自动控制原理胡寿松第四版课后答案.docx
《自动控制原理胡寿松第四版课后答案.docx》由会员分享,可在线阅读,更多相关《自动控制原理胡寿松第四版课后答案.docx(29页珍藏版)》请在冰点文库上搜索。
自动控制原理胡寿松第四版课后答案
1-3
解:
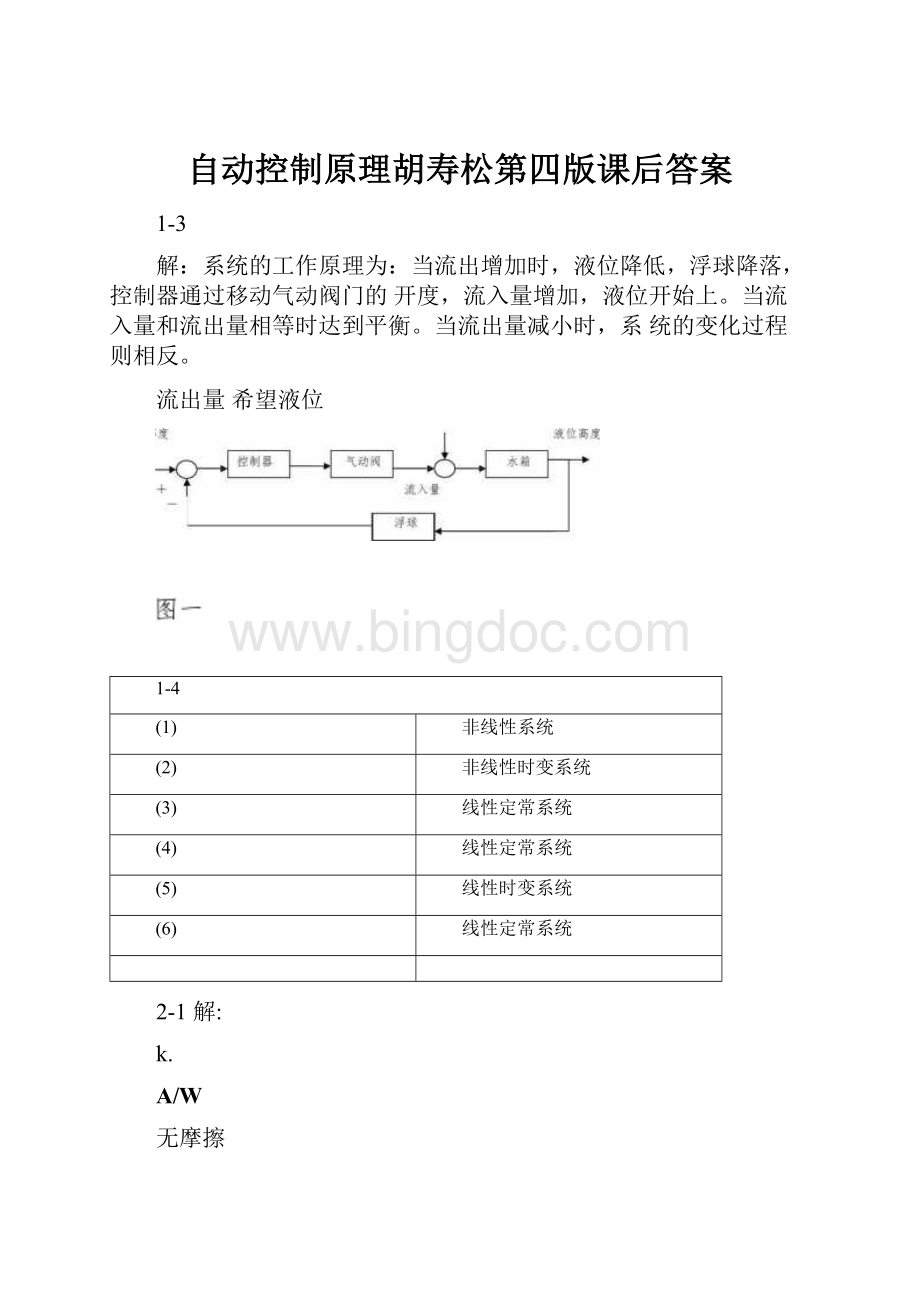
系统的工作原理为:
当流出增加时,液位降低,浮球降落,控制器通过移动气动阀门的开度,流入量增加,液位开始上。
当流入量和流出量相等时达到平衡。
当流出量减小时,系统的变化过程则相反。
流出量希望液位
1-4
(1)
非线性系统
(2)
非线性时变系统
(3)
线性定常系统
(4)
线性定常系统
(5)
线性时变系统
(6)
线性定常系统
2-1解:
k.
A/W
无摩擦
fF⑴
T"
图2-27
显然,弹簧力为kx(t),根据牛顿第二运动定律有:
移项整理,得机械系统的微分方程为:
兰竺)+M)
z=)
dt
2
对上述方程中各项求拉氏变换得:
ms2X(s)+kX(s)=
F(s)
所以,机械系统的传递函数为:
*)亠)亠ms・+
oO
@)
图2-28
由图易得:
人(I)R、=u{(t)-z/2(Z)/.(Z)+£(Q&=u2(t)皿)心)
dt
由上述方程组可得无源网络的运动方程为:
GOT?
+R)dU2CR(r)=(t)
12dt22dt[
对上述方程中各项求拉氏变换得:
CIR\+皿)sU2(s)+U2(s)=CR2sL\(s)+U\(s)
所以,无源网络的传递函数为:
G3亠(s)1+S從_1+sClR、+
"妬(s)R2)
解二(运算阻抗法或复阻抗法):
“3—丄护=1+2
U(s)+1+1+(斤+斤)心
1A—12
1Cs
2-5解:
按照上述方程的顺序,从输出呈开始绘制系统的结构图,其绘制结果如下图所示:
依次消掉上述方程中的中间变量才「尤2,才3,可得系统传递函数为:
c(s)g{(S)©(S)q(S)q
帀(s)1+G2(s)Q(5)Gg(s)+G3(s)G[(s)G(s)+G{(s)G2(s)q(s)6\
(s)[q(s)-q(s)]
2-6解:
02-29
①将q(S)与G\(S)组成的并联环节和q(S)与q(S)组成的并联环节简化,它们的
等效传递函数和简化结构图为:
Cl2(s)=G\(s)+G2
(s)
心(s)二仇(s)-
②将妨2(s).(S)组成的反馈回路简化便求得系统的闭环传递函数为:
2-7解:
斤(S)
由上图可列方程组:
[E(s)q(s)-c3h2(s)]q(s)=c(s)
/?
(s)-乩(s)C=E(s)
(s)
G・z(s)
联列上述两个方程,消掉E(s),得传递函数为:
C(s)_G{(s)G2(s)
丽~1+H、(s)q(s)+
(s)E(s)
联列上述两个方程,消掉C(s),得传递函数为:
E(s)_1+〃2(s)@
両U)
1+”](s)E(s)+H2
(s)6*2(s)
2-8解:
图2-31飞机俯仰角控制系统结构图
将①反馈回路简化,其等效传递函数和简化图为:
将②反馈回路简化,其等效传递函数和简化图为:
0.4
2s,1
5s+■—
0.4*0.53
2s+1
G(s)二0+0.3s+1_5s+3
0.4
2[+0.45?
+~~2+59s+3.4
24.5s
(s+0.3s+1)(5s+3)
将③反馈回路简化便求得系统的闭环传递函数为:
3.5s+2・1
0.7*(5s+
3)
◎。
(s)-5s?
+4・5s2+5・9s+3・4
a
(s)
0.7*Ks怎s+
L+—
5s+(4.5+
3.5/T)s2
+(5.9+2.l«)s+
3.4
5s
3-3解:
该二阶系统的最大超调量:
0刀二八呼*100%
n/~
当o=5%时,可解上述方程得:
g=
0.69
当o=5%时,该二阶系统的过渡时间为:
所以,该二阶系统的无阻尼自振角频料般
3-4解:
题?
-4图由上图可得系统的传递函数:
10*(1+K"
s(s+2)
■■■
10*(As+1)
斤(S)
10*(1+<
1J
Ks)s(s+2)
r+2*(1+5«)s+10
所以吆Vlo,MIF二1+5K
(1)若=0.5时,攵$0.116
所以/rA0.116=0.5
时,g
⑵系统单位阶跃响应的超调量和过渡过程时间分别为:
-1/卜M-0.5*3.14斤
0prH*100%二e/、‘0.52*100%216.3%
T~o.5Vio•、
*
⑶加入(1+心)相当于加入了一个比例微分环节,将使系统的阻尼比增大,可以有效
地减小原系统的阶跃响应的超调量;同时由于微分的作用,使系统阶跣响应的速度(即变
化率)提高了,从而缩短了过渡时间:
总之,加入(1+Ks)后,系统响应性能得到改善。
3-5解:
题3-轻
由上图可得该控制系统的传递函数:
C(s).10缶
斤(s)s~+(10T+1)S+]
二阶系统的标准形式为:
1°«
Q(s)
R(s)
所以
10^
2S;=10t
+1
由
07八"f*100%
_11
二TJ三2
0二
p
9.5%
0.5
可得
g=
0.6
=0.6
由.和
2MIF=10T
+1
K\=
6.16
T=
0.84
ts^3=0.64
3-6解:
(1)列出劳斯表为:
10
208
-0.4
8
因为劳斯表首列系数符号变号2次,所以系统不稳定。
(2)列出劳斯表为:
s1
16
S4
5.5
4
因为劳斯表首列系数全大于零,所以系统稳定。
(3)列出劳斯表为:
s20.81
s1-4.25
因为劳斯表首列系数符号变号2次,所以系统不稳定。
3-7解:
系统的闭环系统传递函数:
«(s+l)
Q(s)s(2s+1)(Ts+1)K(s+1)
~iKs)~s(2s+1)ITS+1)+K(s
7二+D
1.
=s(2s+1)(7s
+1)
«(s+1)
2Ts+(7+2)s2+(Az+l)s+K
列出劳斯表为:
s32TAz+1
s2T+2K
i(K+l)(T+2)-
2KT7+2
(/r+1)(7+2)->o,>0
Mg厂2〉0<■
T>0攵〉0,(«+1)(八2)-2A7〉0
(K+1)(7+2)-2KT=(T+2)+AT+2—2KT
=(7+2)一AT+=(7*+2)-斤(7•-2)>0
题3—露
由上图可得闭环系统传递函数:
—2)〈(T+2)3-9解:
C(s).KKK
斤(s)(1*KKK®g-2修Kbs兀3
KKK
代入已知数据,得二阶系统特征方程:
(1+0.\K)£-0.lAs-
K=0
列出劳斯表为:
s21+0.IX-K
sl-0.1K
s°-K
可见,只要放大器-io〈K〈O,系统就是稳定的。
3-12解:
系统的稳态误差为:
ess=lime(t)
lim
limsE(s)Rls)
s
5"*0
「o1+q(s)
⑴%(s)
系统的静态位置误差系数:
10
仃哑心:
和W)(0.5兀)
系统的静态速度误差系数:
系统的靜态加速度误差系数:
s-*O
s(0・ls+l)(0.5s+1)
当r(t)
/?
(s)=
二4Z■时,—
74
linl1()*—二°・4
1+s(0・Is+1)(0.5s+1)
s-*O
s
To
当r(f)=t2时,_2斤(s)=s
s2
*=00
10S3
S(O・Is+1)(0.5s+1)
142
当r(t)=1(f)+4f+f2时,斥(s埒弋+sss
ess二0+0.4+00二8
3-14解:
由于单位斜坡输入下系统稳态误差为常值二2,所以系统为I型系统
设开环传递函数G(s)
K
=>—二0.5
b
闭环传递函数©(s)-G(s).K
1+G(s)s3+as2+bs+K
Qs=-1±j是系统闭环极点,因此
□K=2
Sa=3
□b=4
□c=1
s"+as2+bs+K=(s+c)(sJ+2s+2)=s'+(2+c)s‘+(2c+2)s+
2c
□K=0.5b
□K=2c
二2c+2
=2+c
所以G(s)2
二s(s2+3s+4)
4-1
(a)(b)
4-2
R二0,P二0,R二.1
1.实轴上的根轨迹
(-8,-1)
(0,0)
2./?
-zz7-3
3条根轨迹趋向无穷远处的渐近线相角为
(q=0,1)
=土180。
(2。
・1)「
60°,180°
3
渐近线与实轴的交点为
0和亠。
"
〃n"33
m
3.系统的特征方程为
dK
1+G(s)=1K.
s(3s+2)=0
s2(S+1)+K=0
(加)2(加+1)+K=0
-32(加+1)+«二0
K-~-jw=0
~K-w2=0
[3二0
在虚轴上。
3二0(舍去)
与虚轴没有交点,即只有根轨迹上的起点,也即开环极点口2二
5-1皿.
5
G(丿3)5
0.25s
=0.25j3
+1
+1
力(3)
5
|(w)=-arctan(0.25a))
二
/Tu.233r
输入r(t)-5cos(4t-30:
)=5w=4
sin(4f+60°)
5-3
系统的稳态输出为
c(t)=J(4)*5cos[4f-30c+0(4)]
=2.5/~2*5cos(4r-30°-45°)
=17.68cos(4t-75°)=17.68sin(4r+15°)
与虚轴的交点为(0,-J0.47)
•oag002OX06OS
RwiA-Ji
(3)G(s)]
s(l+s)(1+
2s)
Gl>)1
=加(1+加)(1+
丿23)
血)=1
©(3)=-90°
-arctang
)-arctan23
3J(1+32)(1+4
/)
0(s)二-90"-arctanw
-arctan2w=
-180°
arctanw+arctan
2s=90°
3=1/(2
G)2=
水3)1=^=ofi7
3)
1/2
=Jl/勾(1+1/2)(1+43
*1/2)
与实轴的交点为(-0.67,-jO)
(4)G(s)1Gl加)1
S'(1+S)(1+=(丿3)2(1+八))(1+
2s)丿2s)
-180:
一arctanw一arctan2a)
0(w)=-180°
2w=90°
-arctanw-arctan2a)=-270carctanw+arctan
3=1/(2
G)2=
血)
12护=°・94
3)
1/2
(1+1/2)(1+4
与虚轴的交点为
(0,jO.94)
血)一「1C(3)
3'J(l+32)(]+4
G)
.707
W
5-4
(2)wj=0.5,w2=1,A=1,u=0
(3)叫二0.5,w2=1,A=1,u=1
(4)w1=0.5,w2=1tA=1,u=2
5-6
G(s)1是一个非最小相位系统
•arctg^)
Q(s)丄是一个最小相位系统
=s+1
5-8(a)
3:
(ffojo:
—90°f0。
f+90°;(co):
+90。
f0°N=P-Z.Z=P-N=O-(-2)=2
闭环系统有2个极点在右半平面,所以闭环系统不稳定
(b)
系统开环传递函数有2个极点在s平面的原点处,因此乃氏回线中半径为无穷小量£的半圆
弧对应的映射曲线是一个半径为无穷大的圆弧:
(0:
0"-0*;0:
-90°-0°f+90°;0(3):
+180°-0°-—180°
N二P-Z,Z二P-N=0-0二0
5-10
(1)
闭环系统有0个极点在右半平面,所以闭环系统稳定
K2.28/(
1s+「s+2.28
\K(s+0.5)
“s十]
(3)
O(s)〃(sfE=«0.5=
S~~1S~~t
——0.51
TOdB/cloc
20lg—=a-20lg+20=40lg
1lg1—1—
0.50.50.5
20lgW=20/T=1/2=
-20lg«=201g
0.5
lg2
0.5
G{s)H(s)-
4«(s+0・5)2(s+0.5)
£(s+€(s十2)
2)
5-11
JYM
K=3
1/3(1+1/]
3)(1+9*1/3)14
Kc=4/3=1.33
G(s)
所以,or=1201gK=0
)=-90°
*0.816*1/2.45
[2E3/w2
-arctgcn=-90°
一12/2_
1-G)/G)
Qen0
□2
arctg_
-1-1/2.452-
□□
“。
十:
2*0.816*1/
二-90-ardg
-arctgO.7995~
2.4^2~1Z□
=-90°-38.64°=-128.64°
Y=180°+0(W)=180°-128.
nu
5
4
2.
2i—-
333
-.8nunu
9
D
6
6
6o.nu
90
o
6
3
•
11
5=o
4
6
⑵叫=(x)2=1/0.2=5
1,
_2E3/g)__3__3_
©(3)二-90°-arctgcn+arctg二-arctg_[
C-1-G)2/W2--W--G)-
DcnD1DD2Q
D
=-128.64°+岔珥科1__警堀_1_=_[2&64°+45°-11.31°=-94.95°
Y=180°M
(wj=180°-94.95°=85.05°
6-5
(1)
G(s)10
=s(0.5s+1)(0.Is
+1)
3=1,20lgK
=201gl0=20^
叫=1/0.5w2=1/0.1=10
=2,
叫=时,厶(叫)二20-20(lg2-lgl)=201gl0-20lg2=201g5=14必
2
w2=时,Z(w2)=bl-40(lgl0-lg2)=-13.96必
10
所以.Z(wl)=40(lg-lg2)=40(lg/2)二\4dB
3°=4.48
0(3、)二-90”-arctgO.5wr-arct^O.lw二-90°-arctg2.24-
arctg0.448
二-90°-65.94°-24.13°=-180.07°
Y=180°M(3.)=180°-180.07°=-0.07°
50
40
30
20
20
-20dB
/dec
40dB/dec
3
-BOdB/tiec
10
100
G{s)Gc(s)
10(0.33s+1)
+1)(0.033s+1)
3=1.20lgTf=201gl0=20^
G),=1/0.5w2=1/0.33w3=1/0.1叫=1/0.033=30
=2,=3,=10,
5=时,£(叫)-Ms?
)=40(lgg)2-lg3】)14-Z(w2)=40(lg34.35-lg2)
Z(w2)=7dB
Z(w3=10)-Z(w2=3)=-20仃gw3-lgw2)=-3.37dB
所以a?
〈3「2〈33
Z(w2)=20(lg(^2-lgq2)=20(lgG)r2/3)=7dZ?
0((叭)=-90”-arctg0.5we.2-arctgO.1G)e2+^rctg^.33a)心一arctg0.033a就
校正环节为相位超前校正,校正后系统的相角裕量增加•系统又不稳定变为稳定,且有一定的稳定裕度,降低系统响应的超调量;剪切频率増加,系统快速性提高;但是高频段增益提
高,系统抑制噪声能力下降。
1p(w)=-arctanco-arctan2w
gZ2)(1+4
32)
Q(s)=一arctans-arctan2w=-90°arctanw+arcran2w=90c
3=1/(2G>2=/1(G))1==n47
3)1/2=+1/2)(1+4*1:
3
 升级会员
升级会员 