自动控制原理实验报告.doc
《自动控制原理实验报告.doc》由会员分享,可在线阅读,更多相关《自动控制原理实验报告.doc(19页珍藏版)》请在冰点文库上搜索。
一、结构图简化方法(梅森公式)
举例说明用Matlab如何实现
例1:
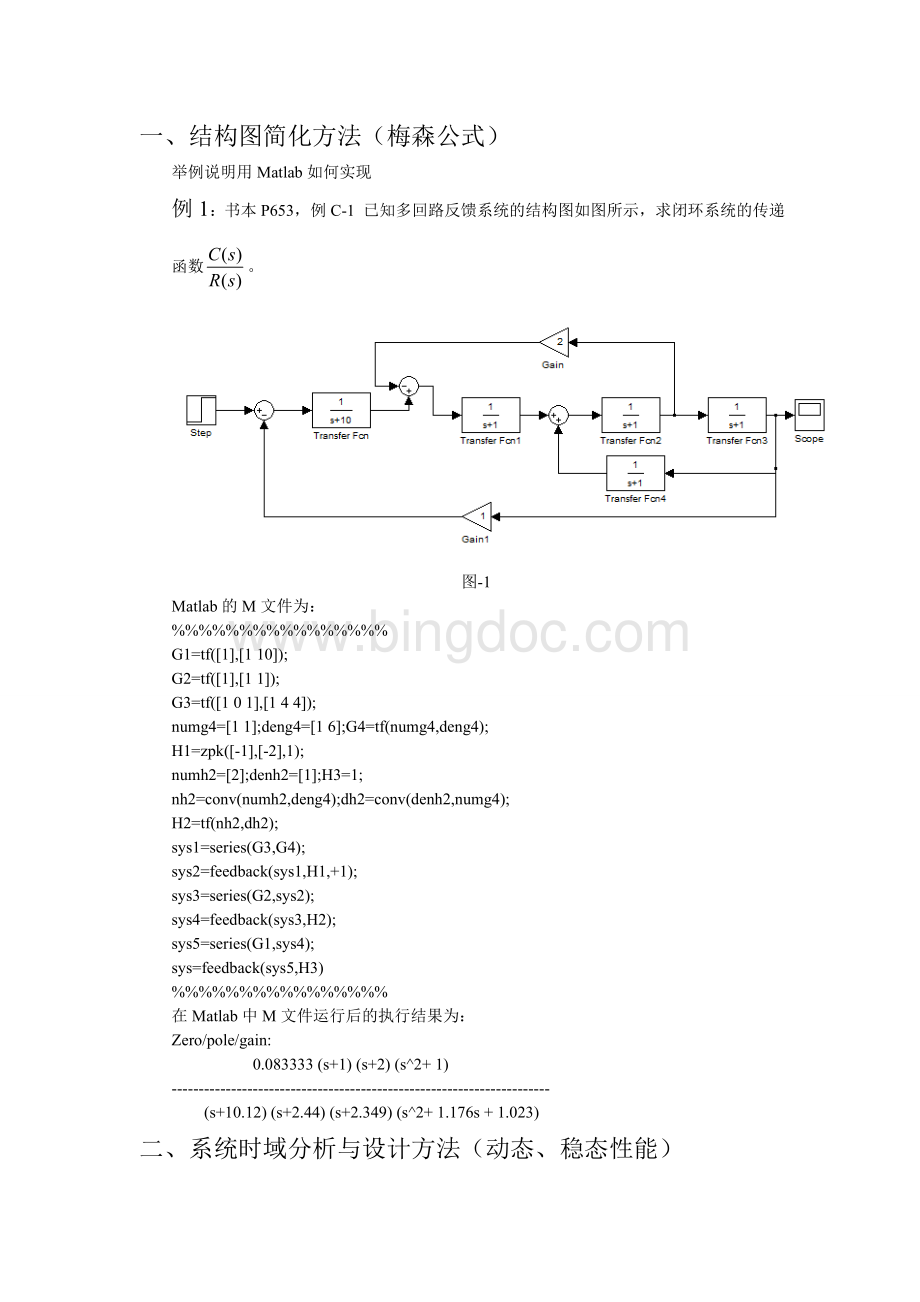
书本P653,例C-1已知多回路反馈系统的结构图如图所示,求闭环系统的传递函数。
图-1
Matlab的M文件为:
%%%%%%%%%%%%%%%%
G1=tf([1],[110]);
G2=tf([1],[11]);
G3=tf([101],[144]);
numg4=[11];deng4=[16];G4=tf(numg4,deng4);
H1=zpk([-1],[-2],1);
numh2=[2];denh2=[1];H3=1;
nh2=conv(numh2,deng4);dh2=conv(denh2,numg4);
H2=tf(nh2,dh2);
sys1=series(G3,G4);
sys2=feedback(sys1,H1,+1);
sys3=series(G2,sys2);
sys4=feedback(sys3,H2);
sys5=series(G1,sys4);
sys=feedback(sys5,H3)
%%%%%%%%%%%%%%%%
在Matlab中M文件运行后的执行结果为:
Zero/pole/gain:
0.083333(s+1)(s+2)(s^2+1)
----------------------------------------------------------------------
(s+10.12)(s+2.44)(s+2.349)(s^2+1.176s+1.023)
二、系统时域分析与设计方法(动态、稳态性能)
1)改变零点与极点位置对系统模态、动态性能、稳态性能的影响。
极点确定系统的运动模态,和稳定性。
零点决定模态在输出中的比例关系。
例2:
设系统闭环传递函数为Φ(s)=,其中,ζ=0.707。
求二阶系统的单位阶跃响应。
执行M文件:
closeall;clearall;
num=[618];den=[12*0.7072];
H=tf(num,den);
sys=tf(num,den);
p=roots(den)
t=0:
0.05:
10;
figure
(1)
step(sys,t);grid
xlabel('t');ylabel('c(t)');title('单位阶跃响应');
则,系统的单位阶跃响应为:
图-2
闭环极点为p=
-0.7070+1.2248i
-0.7070-1.2248i
设具有相同极点但零点不同的传递函数为:
Φ1(s)=
增加的一个零点为s=-1
求其单位阶跃响应
M文件为:
%%%%%%%%%%%%%%%
closeall;clearall;clc
num=[62418];den=[12*0.7072];
H=tf(num,den);
sys=tf(num,den);
p=roots(den)
t=0:
0.05:
10;
figure
(1)
step(sys,t);grid
xlabel('t');ylabel('c(t)');title('单位系统阶跃响应');
%%%%%%%%%%%%%%%
如下图所示为Φ1(s)的单位阶跃响应:
图-3
由此可知:
①、改变闭环传递函数的零点位置会影响系统的动态性能,当加了零点后,超调量变大,上升时间变短。
②、闭环传递函数的零点不形成自由运动的模态,但它们影响各模态在响应中所占的比重,所以,改变闭环传递函数的零点位置也会对响应曲线的形状产生影响。
③、改变系统的零点,对系统的稳态性能没有影响。
设具有相同零点但极点不同的传递函数分别为
Φ2(s)=,其中,ζ=0.5。
求此时Φ2(s)函数的单位阶跃响应:
M文件为:
%%%%%%%%%%%%
closeall;clearall;clc
num=[618];den=[12*0.52];
sys=tf(num,den);
p=roots(den)
t=0:
0.01:
3;
figure
(1)
step(sys,t);grid
xlabel('t');ylabel('c(t)');title('单位系统阶跃响应');
%%%%%%%%%%%%
执行M文件的结果为:
Φ2(s)的单位阶跃响应为:
图-4
由此可知:
①改变系统的极点会对系统动态性能产生影响,当ξ从0.707变为0.5时,系统振荡时间变长,调节时间变短,上升时间变短。
②改变系统的极点会改变系统的运动模态。
③改变系统的闭环极点对系统的稳态性能没有影响。
2)举例说明主导极点、偶极子的概念。
(1)主导极点的说明:
例3:
Φ(s)==
=
利用Matlab绘制函数的零、极点和单位阶跃响应。
M文件为:
%%%%%%%%%%%%%%%
closeall;clearall;clc
num=[816.8];den=[111272616];
sys=tf(num,den);
p=roots(den)
t=0:
0.01:
10;
figure
(1);
xlabel('RealAxis');ylabel('ImaginaryAxis');title('Pole-ZeroMap');
pzmap(sys),
xlabel('t');ylabel('c(t)');title('Φ(s)的单位阶跃响应');
figure
(2)
%%%%%%%%%%%%%%%
执行M文件的结果为单位阶跃响应如下图:
它们的零、极点分布图如下图所示(极点用“x”表示,零点用“o”表示。
)
图-5
极点为p=
-8.0000
-2.0000
-0.5000+0.8660i
-0.5000-0.8660i
Φ(s)的单位阶跃响应为:
图-6
将函数Φ(s)改为:
Φ’(s)=
去除了极点p1=-8.0000和p2=-2.0000
利用Matlab绘制函数的单位阶跃响应。
M文件为:
%%%%%%%%%%%%%%%
closeall;clearall;clc
num=[1.05];den=[111];
sys=tf(num,den);
p=roots(den)
t=0:
0.01:
15;
figure
(1);
step(sys,t);grid
xlabel('t');ylabel('c(t)');title('G(s)的单位阶跃响应');
%%%%%%%%%%%%%%%
执行M文件可得Φ’(s)的单位阶跃响应为:
图-7
极点为p=
-0.5000+0.8660i
-0.5000-0.8660i
比较图-6和图-7可知,改变主导极点时系统的动态性能和稳态性能基本不变。
所以,主导极点在系统的时间响应中起主导作用。
(2)偶极子概念:
偶极子对:
是指若在某一极点的附近同时存在一个零点,而在该零、极点的附近又无其它的零点或极点。
就称这个极点和这个零点为一个偶极子对。
由于零、极点在数学上位置分别是的分子分母,工程实际中作用又相反,因此可作近似处理,近似地认为偶极子对中零、极点对系统的作用相互抵消了。
例4:
设系统传递函数为:
G(s)===
利用Matlab绘制函数的零、极点和单位阶跃响应。
M文件为:
%%%%%%%%%%%%%%
closeall;clearall;clc
num=[10.31];den=[11.350.3650.015];
sys=tf(num,den);
p=roots(den)
t=0:
0.01:
120;
figure
(1);
pzmap(sys),
xlabel('RealAxis');ylabel('ImaginaryAxis');title('Pole-ZeroMap');
figure
(2)
step(sys,t);grid
xlabel('t');ylabel('G(s)');title('G(s)的单位阶跃响应');
%%%%%%%%%%%%%%
执行M文件的结果为下图:
它们的零、极点分布图如下图所示(极点用“x”表示,零点用“o”表示。
)
图-8
单位阶跃响应如下图:
图-9
零点为z=-0.31
极点为p=-1.0000
-0.3000
-0.0500
M文件执行结果可知闭环零点z=-0.31,和闭环极点p1=-0.3互为偶极子。
将函数的偶极子点去除后函数改为G’(s):
G’(s)===
利用Matlab绘制函数的零、极点和单位阶跃响应和单位脉冲响应。
M文件为:
%%%%%%%%%%%%%%
closeall;clearall;clc;
num=[1];den=[11.050.05];
sys=tf(num,den);
p=roots(den)
t=0:
0.01:
120;
figure
(1);
pzmap(sys),
xlabel('RealAxis');ylabel('ImaginaryAxis');title('Pole-ZeroMap');
figure
(2)
step(sys,t);grid
xlabel('t');ylabel('c(t)');title('G’(s)的单位阶跃响应');
figure(3)
impulse(sys,t);grid
xlabel('t');ylabel('c(t)');title('G’(s)单位脉冲响应');
%%%%%%%%%%%%%%
执行M文件的结果为下图:
它们的零、极点分布图如下图所示(极点用“x”表示,零点用“o”表示。
)
图-10
单位阶跃响应如下图:
图-11
比较图-9和图-11可知,系统的上升时间和调节时间和稳态误差基本不变,偶极子的对系统的动态性能和稳态性能影响基本可以忽略。
3)举例说明提高系统型别的作用,改善二阶系统的性能的方法。
举例5:
0型系统:
G(s)==
具体步骤如下:
(1)首先对系统判稳。
在Matlab中执行M文件如下:
%%%%%%%%%%%%
closeall;clearall;clc
num=[1];den=[11.84.5];
sys=tf(num,den);
p=roots(den)
t=0:
0.01:
20;
figure
(1);
step(sys,t);grid
xlabel('t');ylabel('c(t)');title('G'(s)的单位阶跃响应');
figure
(2)
u=t;
lsim(sys,u,t,0);grid
xlabel('t');ylabel('c(t)');title('G'(s)的斜坡响应');
figure(3)
u=0.5*t.^2;
lsim(sys,u,t,0);grid
xlabel('t');ylabel('c(t)');title('G'(s)的加速度响应');
%%%%%%%%%%%%
M文件执行结果为:
p=-0.9000+1.9209i
-0.9000-1.9209i
阶跃函数图像为:
图-12
斜坡响应图像为:
图-13
加速度响应为:
图-14
(2)提高系统型别,函数变为:
G(s)H(s)==
具体步骤如下:
(1)首先对系统判稳。
在Matlab中执行M文件如下:
%%%%%%%%%%%%%%%%
closeall;clearall;
num=[1];den=[11.84.50];
sys1=tf(num,den);sys=feedback(sys1,1);
p=roots(sys.den{1})
t=0:
0.01:
50;
figure
(1);step(sys,t);grid
xlabel('t');ylabel('c(t)');title('G'(s)的单位阶跃响应');
figure
(2);u=t;lsim(sys,u,t,0);grid
xlabel('t');ylabel('c(t)');title('G'(s)的斜坡响应');
figure(3);u=0.5*t.^2;lsim(sys,u,t,0);grid
xlabel('t');ylabel('c(t)');title('G'(s)的加速度响应');
%%%%%%%%%%%%%%%%
M文件执行结果为:
p=-0.7787+1.8750i
-0.7787-1.8750i
-0.2426
阶跃函数图像为:
图-15
斜坡响应图像为:
图-16
加速度响应图像为:
图-17
比较图-12~图-17可知,当系统型别从0型提高到Ⅰ型时,单位阶跃响应额稳态误差变为0,斜坡响应的误差从无穷变为常数,加速度响应变小。
如果继续提高系统型别,单位阶跃响应和斜坡响应的稳态误差都将趋近于0,加速度响应的稳态误差将趋于常数。
三、系统根轨迹分析设计方法(动态、稳态性能)
1)举例说明增加零点对根轨迹的影响
作用:
使根轨迹向复平面左侧弯曲或移动,增加系统的相对稳定性,增大系统阻尼,改变渐近线的倾角,减少渐近线的条数。
例6:
书本P656,例C-2。
设开环传递函数为:
G(s)=
在Matlab中执行M文件如下:
%%%%%%%%%%%%
G=tf([1],[1420]);
figure
rlocus(G);
%%%%%%%%%%%%
执行M文件的结果为:
根轨迹图为:
图-18
增加零点后开环传递函数变成:
G(s)=
在Matlab中执行M文件如下:
%%%%%%%%%%%%
G=tf([12],[12420]);
figure;rlocus(G);
%%%%%%%%%%%%
执行M文件所得根轨迹图为:
图-19
比较图-18和图-19可知,在系统中增加开环零点时,可以使根轨迹向s左半平面弯曲。
2)举例说明开环不稳定系统可能稳定
例7:
设开环传递函数为:
G(s)=
在Matlab中画出K从0变化到无穷时的根轨迹图。
可知,G(s)的等效开环传递函数为:
G*(s)=
在Matlab中执行M文件如下:
%%%%%%%%%%%%
closeall;clearall;
G=tf([13],[13-20]);
figure
(1)
rlocus(G);
%%%%%%%%%%%%
执行M文件所得根轨迹图为:
图-20
由图-20可知开环不稳定系统是可能稳定的,其稳定性和开环增益K有关。
四、频域特性分析方法
(1)、福相频域特性曲线
(2)、对数频域特性曲线(Bode图)
(3)、对数福相曲线(尼科尔斯曲线)
运用频域的几何图形,可以通过奈氏判据和对数频率稳定判据对系统的稳定性进行判别。
系统的的稳定裕度分为相角裕度γ和幅值裕度h。
对于闭环稳定系统,如果系统开环相频特性再滞后γ度,则系统将处于临界稳定状态。
同样,对于开环稳定系统,如果开环幅频特性再增大h倍,则系统将处于临界稳定状态。
例8:
已知单位负反馈系统的开环传递函数为:
G(s)=
在Matlab中执行M文件如下:
%%%%%%%%%%%%
closeall;clearall;clc;
G=tf([1280640],[124.21604.81320.2416]);
figure
(1);margin(G);
figure
(2);nyquist(G);
axisequal
%%%%%%%%%%%%
执行M文件的结果为:
伯德图为:
图-21
奈奎斯特图为:
图-22
由图-21和图-22,根据奈氏判据和系统的相角裕度可以判断:
幅值裕度h=29.5dB>1,系统的相角裕度γ=72.9°>0,截止频率Wc=0.904rad/s,穿越频率Wx=39rad/s。
奈氏曲线不包围(-1,j0)点,又因为系统无右半平面的开环极点,所以根据奈氏判据,系统稳定。
五、系统频率特性设计方法
例9:
课本P234,例5-19。
当考虑弹簧簧片的弹性影响时,磁头位置控制系统如图-23所示。
磁头与簧片的典型参数:
ζ=0.3,ωn=18.85×103rad/s。
要求确定开环增益K=100时,磁盘驱动读取系统的幅值裕度h(dB)、相角裕度γ及闭环系统的带宽频率ωn,并估算系统单位阶跃响应σ%和ts。
图-23
解:
取K1=2000,则开环增益K=100。
求取系统的对数特性、闭环函数的对数特性、系统的单位阶跃响应。
在Matlab中执行M文件为:
%%%%%%%%%%%%%
closeall;clearall;clc;
num=2000*0.05*[1,1];
den=[conv(conv([0.001,1],[1/20,1]),conv([1,0],[(1/18850)^2,2*0.3/18850,1]))];
G0=tf(num,den);G=feedback(G0,1);
t=0:
0.0001:
0.02;
figure
(1);bode(G0);grid
figure
(2);bode(G);grid
figure(3);step(G,t);grid
%%%%%%%%%%%%%
执行M文件所得开环对数频率曲线为:
图-24
闭环频率特性曲线为:
图-25
单位阶跃响应曲线为:
图-26
由图-24可知:
h=22.8dB,γ=37.3º,截止频率为1200rad/s。
由图-25可知:
带宽为2000rad/s。
当K1=2000时,自然频率及其附近的系统谐振频率,会位于闭环带宽之外,使簧片弹性对系统动态性能几乎没有影响
由图-26可知:
超调量σ=31%,调节时间ts=9.2ms(Δ=0.2)。
参考文献:
[1]东方,张俊勇.MATLAB在控制系统稳态误差分析中的应用[J].陕西西安:
陕西国防工业职业技术学院院报,2007
[2]胡寿松.自动控制原理(第五版)[M].北京:
科学出版社,2007
[3]周开利,邓春晖.MATLAB基础及应用教程[M].北京:
北京大学出版社,2007
 升级会员
升级会员 