机器人导论第一次作业.docx
《机器人导论第一次作业.docx》由会员分享,可在线阅读,更多相关《机器人导论第一次作业.docx(3页珍藏版)》请在冰点文库上搜索。
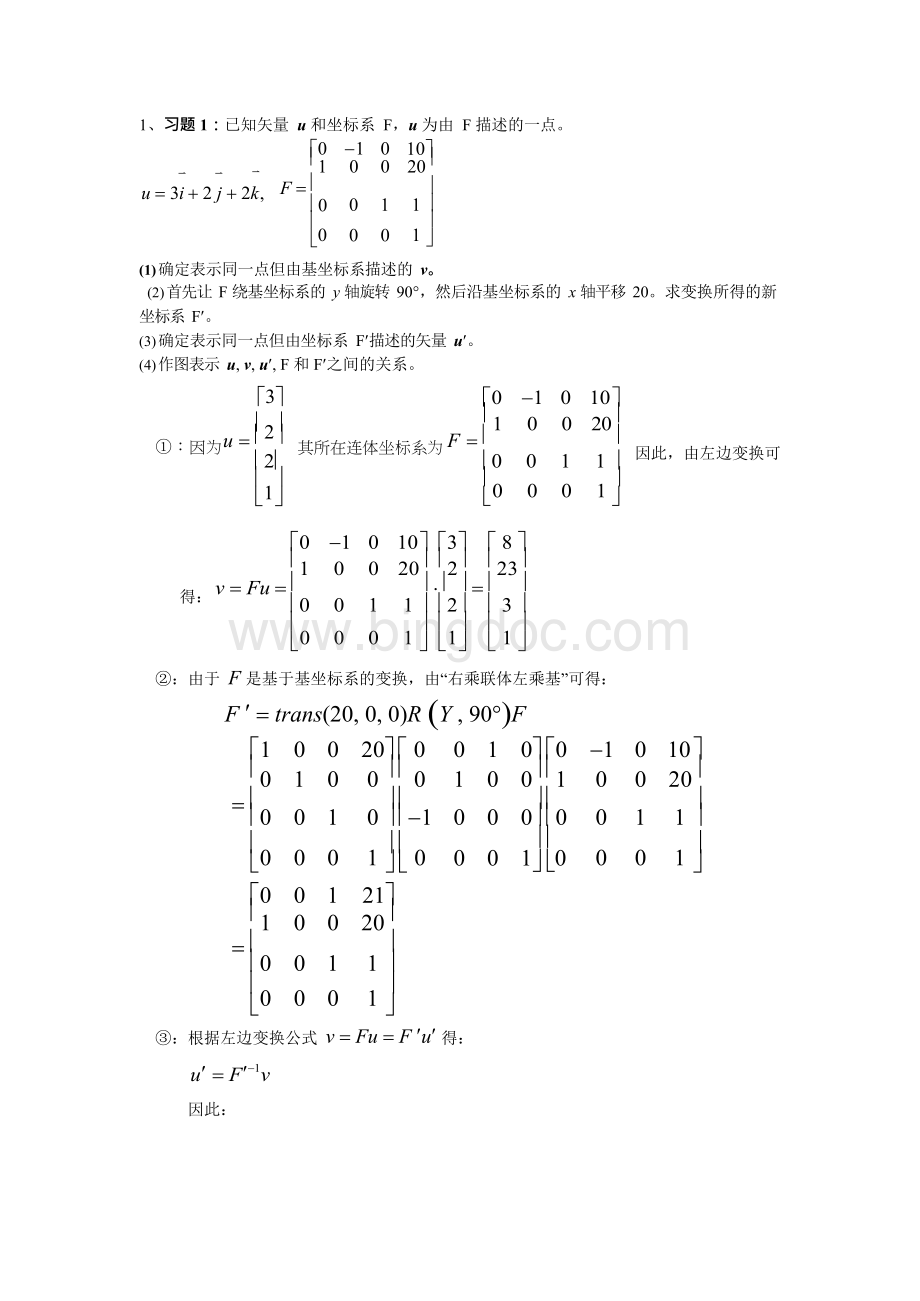
1、习题1:
已知矢量u和坐标系F,u为由F描述的一点。
v v v
�é0 -1 0
ê1 0 0
�10ù
20ú
u=3i+2j+2k,
�F=ê
ê0
0
ê
ë
�ú
0 1 1ú
1
ú
0 0 û
(1)确定表示同一点但由基坐标系描述的v。
(2)首先让F绕基坐标系的y轴旋转90°,然后沿基坐标系的x轴平移20。
求变换所得的新坐标系F¢。
(3)确定表示同一点但由坐标系F¢描述的矢量u¢。
(4)作图表示u,v,u¢,F和F¢之间的关系。
é3ù
�é0 -1 0 10ù
ê2ú
êú
①:
因为u=êú
2
1
êú
ëû
�ê1 0 0 20ú
ê ú
其所在连体坐标系为F=ê ú
0 0 1 1
ë û
ê0 0 0 1ú
�
因此,由左边变换可
é0 -1 0 10ùé3ù é8ù
ê1 0 0 20úê2ú ê23ú
得:
v=Fu=ê ú×êú=ê ú
ê0 0 1 1úê2ú ê3ú
0 0 0 1 1 1
ê úêú ê ú
ë ûëû ë û
②:
由于F是基于基坐标系的变换,由“右乘联体左乘基”可得:
F¢=trans(20,0,0)R(Y,90°)F
é1 0 0 20ùé0 0 1 0ùé0 -1 0 10ù
ê0 1 0 0úê0 1 0 0úê1 0 0 20ú
=ê úê úê ú
û
ê0 0 1 0úê-1 0 0 0úê0 0 1 1ú
ë ûë
ê0 0 0 1úê0
é0 0 1 21ù
ê1 0 0 20ú
=ê ú
ê0 0 1 1ú
ë û
ê0 0 0 1ú
�úê
0 0 1ûë0
�0 0 1ú
③:
根据左边变换公式v=Fu=F¢u¢得:
u¢=F¢-1v
因此:
é0 -1 0 10ùé8ù é3ù
ê1 0 0 20úê23ú ê13ú
u¢=ê ú×ê ú=ê ú
ê0 0 1 1úê3ú ê-13ú
ê0 0 0 1úê1ú ê1ú
ë ûë û ë û
④:
zA
zF
yF(zF’)
yA
xA
P
xF
xF’
yF’
2、已知其次变换矩阵
é0 1
ê0 0
H=ê
ê-1 0
0
ê
ë 0
�0 0ù
0
ú
-1 ú
0 0ú
1
ú
0 û
要求Rot(f,q)=H,确定f和q的值。
已知齐次变换矩阵
é0 1 0 0ù
ê0 0 -1 0ú
Rot(f,q)=ê ú,
ê-1 0 0 0ú
ë û
ê0 0 0 1ú
可知:
n+o+a=(f2+f2+f2)versq+3cq
x y z x y z
=1+2cq=0
1
得cq=- ,因此sq=±
2
�3。
由于0£q£180o得:
q=120o,sq= 3
2 2
3
3
3
ìf=(o-a) = é ù
ïx z y 3 ê3ú
3
3
éfxù ï ê ú
3
ê ú ï ê ú
由f=êfyú,且ífy=(ax-nz)
�= ,得f=ê ú
3 3
êfú ï ê ú
3
3
ëzû ï
�ê 3ú
ïfx=(ny-ox) =-
ïî 3
�êê-3ú
ë
û
3、矢量Q绕矢量f旋转q角,产生新的矢量Q¢,即Q¢=Rot(f,q)Q。
求证:
Q¢=Qcq+sq(f´Q)+(1-cq)[Q-(f´Q)´f]根据通用旋转变换的齐次变换阵,经过
化简可得:
�
é(1-cq)(fxfxQx+fxfyQy+fxfzQz)+cqQx+sq(fyQz-fzQy)ù
ê(1-cq)(ffQ+ffQ+ffQ)+cqQ+sq(fQ-fQ)ú
Rot(f,q)Q=ê
�xyx yyy yzz y zx xzú
ê(1-cq)(fxfzQx+fzfyQy+fzfzQz)+cqQz+sq(fxQy-fyQx)ú
ê 1 ú
ë û
Q¢=Qcq+sq(f´Q)+(1-cq)[Q-(f´Q)´f]
écqQx+sq(fyQz-fzQy)+(1-cq)(Qx-fyfyQx-fzfzQx+fxfyQy+fxfzQz)ù
êcqQ+sq(fQ-fQ)+(1-cq)(Q-ffQ-ffQ+ffQ+ffQ)ú
=ê y zx xz y xxy zzy xyx yzzú
êcqQz+sq(fxQy-fyQx)+(1-cq)(Qz-fyfyQz-fxfxQz+fxfzQx+fzfyQy)ú
ê 1 ú
ë û
x y z
由(f2+f2+f2)=1可得:
Qx-fyfyQx-fzfzQx+fxfyQy+fxfzQz
=Qx(1-fyfy-fzfz)+fxfyQy+fxfzQz
=fxfxQx+fxfyQy+fxfzQz
即(Rot(f,q)Q)1=Q1¢,同理(Rot(f,q)Q)2=Q2¢,(Rot(f,q)Q)3=Q3¢。
由上述证明可得Rot(f,q)Q=Q¢
 升级会员
升级会员 