控制工程基础实验Word文件下载.docx
《控制工程基础实验Word文件下载.docx》由会员分享,可在线阅读,更多相关《控制工程基础实验Word文件下载.docx(13页珍藏版)》请在冰点文库上搜索。
其中假设,
(1)要求绘出系统的状态响应曲线
(2)并将上述系统在的条件下线性化,并要求绘出线性化后系统的状态响应曲线,并与非线性系统状态响应曲线相比较。
解:
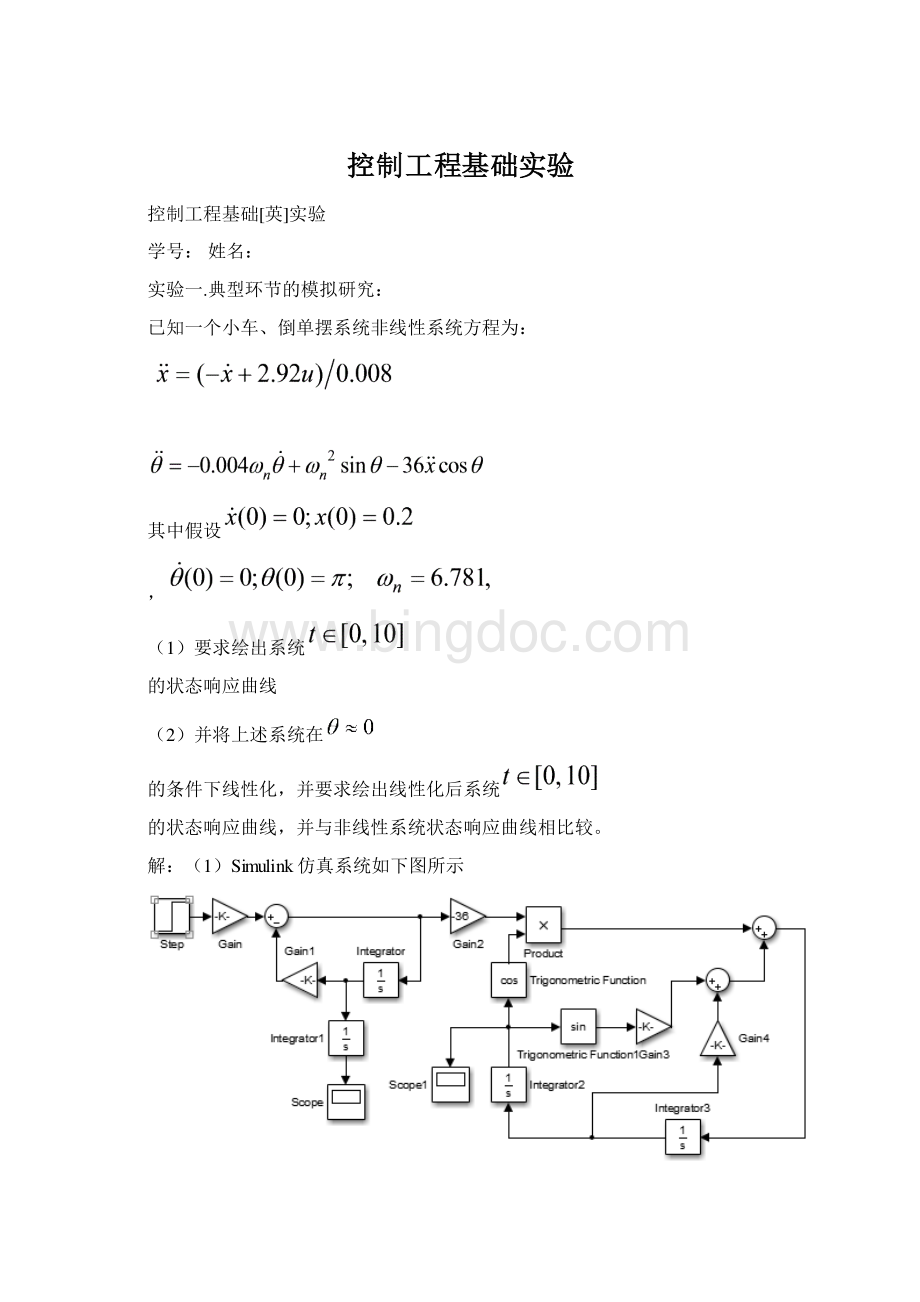
(1)Simulink仿真系统如下图所示X的状态响应曲线:
的状态响应曲线:
(2)Simulink仿真系统如下图所示:
X的状态响应曲线:
改(0)=pi/2,系统t的范围为0,100。
实验二.典型系统时域响应动、静态性能和稳定性研究;
已知系统的开环传递函数为
(1)利用已知的知识判断该开环系统的稳定性(系统的特征方程根、系统零极点表示法)。
(2)判别系统在单位负反馈下的稳定性,并求出闭环系统在内的脉冲响应和单位阶跃响应,分别绘制出相应响应曲线。
(1)其特征方程根为:
系统零极点表示法:
pzmap(num,den)得开环系统零极点分布图:
系统的极点在位于虚轴上,所以系统处于临界稳定状态。
(2)求取闭环传递函数:
极点在虚轴上,所以系统处于临界稳定状态。
脉冲响应:
阶跃响应:
实验三.控制系统的频率特性研究;
针对如右图所示系统,已知被控系统G(s)的传递函数为:
(1)要求画出该闭环系统的根轨迹曲线图(随K变化)
(2)求出该闭环系统的传递函数T(s),并画出当K=2该闭环系统的Bode图,并分别在图中求出闭环系统的相角裕度与幅值裕度。
(1)特征方程:
1+K1/(s2+s)=0根轨迹:
(2)传递函数:
T(s)=KG(s)/1+KG(s)=K/(s2+s+K)K=2时,bode图:
当时,w=1,25rad/s,对应的相角为-141,相角裕度为:
180-141=39当时,相角为180,所以幅值裕度为:
实验四.线性系统校正.针对如左图所示系统,已知系统被控系统G(s)的传递函数为:
(1)当比例控制器增益K=1时,在Matlab/Simulink中搭建仿真系统,当输入为阶跃函数时,用示波器Scope观测系统的输出,绘出响应曲线。
并将对象输出y(t)与时钟输出输入Workspace中,编程求出系统的响应时间、调节时间及超调量,并将计算结果与根据理论公式计算值相比较。
(2)调节控制器增益,使超调量,且稳态误差,给出此时K值的范围。
(3)如果想使稳态误差,应考虑将上述的比例控制器该为何种控制器,即选用比例积分控制器,或比例微分控制器,或比例、积分与微分控制器,试从超前/滞后校正理论论证,并绘出对应的响应曲线。
(1)simulink中搭建仿真系统及示波器scope的输出如下图:
运行结果:
pos=141.8853tr=0.1000ts=9.9000ess=0.9969所以:
响应时间tr=1.6055s,调节时间ts=2.2055s,超调量pos=11.81而理论值:
响应时间ts=0.584s,调节时间tr=1.801s,超调量pos=12.02实际响应时间和调节时间的误差非常大,而超调量的误差较小。
(2)K=4时:
pos=0.2777tr=1.3009ts=2.5345ess=0.2000K=4.82时:
pos=0.3200tr=1.2882ts=2.4167ess=0.1718综上,4K4.82(3)选用比例积分与微分控制器,参数为P=6,I=1,D=0.3系统为型系统,型系统对于单位阶跃输入,其稳态误差为0。
 升级会员
升级会员 