机械振动知识点资料讲解Word格式.docx
《机械振动知识点资料讲解Word格式.docx》由会员分享,可在线阅读,更多相关《机械振动知识点资料讲解Word格式.docx(14页珍藏版)》请在冰点文库上搜索。
(一)简谐运动
如果质点的位移与时间的关系遵从 函数的规律,即它的振动图象(x-t图象)是一条正弦曲线,这样的振动,叫做简谐运动。
简谐运动是机械振动中最简单、最基本的振动。
弹簧振子的运动就是简谐运动。
(二)描述简谐运动的物理量
(1)振幅(A)
振幅是指振动物体离开 位置的 距离,是表征振动强弱的物理量。
一定要将振幅跟位移相区别,在简谐运动的振动过程中,振幅是 变的,而位移是时刻在 变的。
(2)周期(T)和频率(f)
振动物体完成一次 所需的时间称为周期,单位是秒(s);
单位时间内完成 的次数称为频率,单位是赫兹(HZ)。
周期和频率都是描述振动快慢的物理量。
周期越小,频率越大,表示振动得越快。
周期和频率的关系是:
(3)相位(φ)
相位是表示物体振动步调的物理量,用相位来描述简谐运动在一个全振动中所处的阶段。
(三)固有周期、固有频率
任何简谐运动都有共同的周期公式:
,其中m是振动物体的 ,k是回复力系数,对弹簧振子来说k为弹簧的 系数。
对一个确定的简谐运动系统来说,m和k都是恒量,所以T和f也是恒量,也就是说简谐运动的周期只由本身的特性决定,与振幅关,只由振子质量和回复力系数决定。
T叫系统的 周期,f叫 频率。
可以证明,竖直放置的弹簧振子的振动也是简谐运动,周期公式也是
。
这个结论可以直接使用。
(四)简谐运动的表达式
y=Asin(ωt+φ),其中A是 ,
,φ是t=0时的相位,即初相位或初相。
知识点三:
简谐运动的回复力和能量
(一)回复力:
使振动物体回到平衡位置的力。
(1)回复力是以命名的力。
性质上回复力可以是重力、弹力、摩擦力、电场力、磁场力等,它可能是几个力的合力,也可能是某个力或某个力的分力。
如在水平方向上振动的弹簧振子的回复力是弹簧在伸长和压缩时产生的
力;
在竖直方向上振动的弹簧振子的回复力是弹簧 力和 力的合力。
(2)回复力的作用是使振动物体回到平衡位置。
回复力的方向总是“ 平衡位置”。
(3)回复力是是振动物体在方向上的合外力,但不一定是物体受到的合外力。
(二)对平衡位置的理解
(1)平衡位置是振动物体最终振动后振子所在的位置。
(2)平衡位置是回复力为的位置,但平衡位置是合力为零的位置。
(3)不同振动系统平衡位置不同。
竖直方向的弹簧振子,平衡位置是其弹力
于重力的位置;
水平匀强电场和重力场共同作用的单摆,平衡位置在电场力与重力的合力方向上。
(三)简谐运动的动力学特征
F回= ,a回=-kx/m,其中k为比例系数,对于弹簧振子来说,就等于弹簧的 系数。
负号表示回复力的方向与位移的方向 。
也就是说简谐运动是在跟对平衡位置的位移大小成正比、方向总是指向平衡位置的力作用下的振动。
弹簧振子在平衡位置时F回= 。
当振子振动过程中,位移为x时,由胡克定律(弹簧不超出弹性限度),考虑到回复力的方向跟位移的方向相反,有F回= ,k为弹簧的劲度系数,所以弹簧振子做简谐运动。
(四)简谐运动的能量特征
振动过程是一个动能和势能不断转化的过程,总的机械能 。
振动物体总的机械能的大小与振幅有关,振幅越大,振动的能量越。
知识点四:
简谐运动过程中各物理量大小、方向变化情况
(一)全振动
振动物体连续两次运动状态(位移和速度)完全相同所经历的的过程,即物体运动完成一次规律性变化。
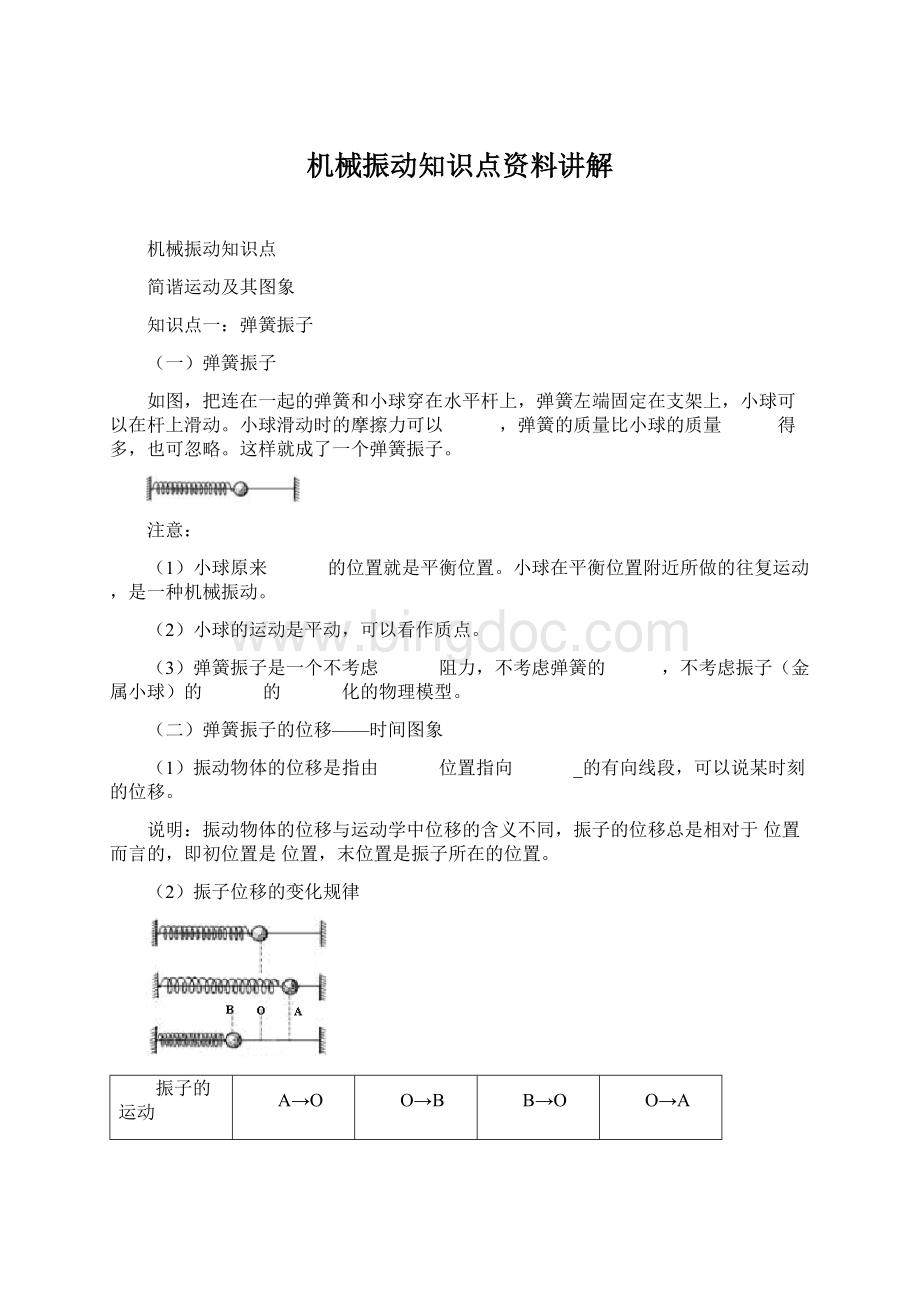
(二)弹簧振子振动过程中各物理量大小、方向变化情况
过程:
物体从A由静止释放,从A→O→B→O→,经历一次全振动,图中O为平衡位置,A、B为最大位移处:
取OB方向为正:
物理量
过程
位移s
速度v
加速度a
回复力F
动能Ek
势能EP
运动性质
A
最大(-)
最大
最大
kA
A→O
(-)
增大
(+)
增大
减小
a↓的变加速运动
O
势能全部转化为动能
O→B
(+)
减小(+)
(-)
a↑的变减速运动
B
动能全部转化为势能
B→O
O→A
(-)
(+)
小结:
弹簧振子的运动过程是完全对称的。
(1)B、O、A为三个特殊状态
O为平衡位置,即速度具有最大值vmax,而加速度a=
A为负的最大位移处,具有加速度最大值amax,而速度v=
B为正的最大位移处,具有加速度最大值amax,而速度v=
(2)其运动为变加速运动与变减速运动的交替过程,在此过程中,机械能守恒,动能和弹性势能之间相互转化
加速度a与速度v的变化
(3)任一点C的受力情况
重力G与弹力N平衡;
F回=F弹=kx,可看出回复力方向始终与位移方向相反
知识点五:
简谐运动图象的应用
(一)简谐运动图象的物理意义
图象描述了做简谐运动的质点的位移随时间变化的规律,即是位移——时间函数图象。
注意振动图象质点的运动轨迹。
(二)简谐运动图象的特点
简谐运动的图象是一条正弦(余弦)曲线。
(1)从平衡位置开始计时,函数表达式为
,图象如图1。
(2)从最大位移处开始计时,函数表达式
,图象如图2。
(三)简谐运动图象的应用
(1)振动质点在任一时刻的位移。
如图中,对应t1、t2时刻的位移分别为x1=+7cm、x2=-5cm。
(2)确定振动的振幅、周期和频率。
图中位移的值就是振幅,如图表示的振动振幅是10cm;
振动图象上一个完整的正弦(余弦)图形在时间轴上拉开的“长度”表示。
由图可知,OD、AE、BF的间隔都等于=0.2s;
频率
(3)确定各时刻质点的速度、加速度(回复力)的方向。
加速度方向总与位移方向相。
只要从振动图象中认清位移的方向即可。
例如在图中t1时刻质点位移x1为正,则加速度a1为负,两者方向相反;
t2时刻,位移x2为负,则a2便为正;
判定速度的方向的方法有:
①位移——时间图象上的斜率代表速度。
某时刻的振动图象的斜率大于0,速度方向与规定的正方向;
斜率小于0,速度的方向与规定的正方向;
②将某一时刻的位移与相邻的下一时刻的位移比较,如果位移,振动质点将远离平衡位置;
反之将靠近平衡位置。
例如图中在t1时刻,质点正远离平衡位置运动;
在t3时刻,质点正向着平衡位置运动。
(4)比较不同时刻质点的速度、加速度、动能、势能的大小。
加速度与的大小成正比。
如图中|x1|>|x2|,所以|a1|>|a2|;
而质点的位移越大,它所具有的势能越,动能、速度则越。
如图中,在t1时刻质点的势能EP1大于t2时刻的势能EP2,而动能则Ek1<Ek1,速度v1<v1。
若某段时间内质点的振动速度指向平衡位置(可为正也可为负),则质点的速度、动能均变,回复力、加速度、势能均变,反之则相反。
凡图象上与t轴距离的点,振动质点具有相同的动能和势能。
单摆外力作用下的振动
单摆
(一)单摆
如图所示,一条 的细线下端拴一小球,上端固定,如果细线的质量与 相比可以忽略,球的直径与 的长度相比可以忽略,这样的装置叫单摆。
单摆是实际摆的理想化模型。
(二)在摆角较小的条件下,单摆的振动是 运动
证明:
将摆球由平衡位置O点拉开一段距离,然后由静止释放,摆球在摆线拉力T和重力G共同作用下,沿圆弧在其平衡位置O点左右往复运动。
当它摆到位置P时,摆线与竖直夹角为θ,将重力沿圆周切线方向和法线方向(半径方向)分解成两个分力G1与G2,其中G1=mgsinθ,G2=mgcosθ
G2与T在一条直线上,它们的合力是维持摆球做圆周运动的 力。
它改变了摆球的运动 ,而不改变其速度的大小。
而G1不论摆球在平衡位置O点左侧还是右侧,始终沿圆弧切线方向 平衡位置O,正是在G1的作用下摆球才在平衡位置附近做往复运动,所以G1是摆球振动的 力。
即:
F回= 。
在摆角较小的条件下,
在考虑了回复力F回的方向与位移x方向间的关系,回复力可表示为:
F回=
对一个确定的单摆来说,m、
都是确定值,所以
为常数,即满足F回=-kx。
所以在摆角较小的条件下,使摆球振动的回复力跟位移大小成 ,而方向与位移的方向 ,故单摆的振动是简谐运动。
(三)几种常见的单摆模型
R
O
a
θ
探究单摆的周期与摆长的关系
(一)探究思路
探究影响单摆周期的因素可以从单摆的装置入手,单摆的装置包括细绳和小球。
因此影响单摆周期的因素可能有:
细绳的长度、小球的质量、摆角等。
在这里只探究单摆的周期与摆长的关系。
(二)操作技巧
(1)实验所用的单摆应符合理论要求,即摆线要且弹性要,摆球用密度和质量较的小球,以减小空气阻力影响,并且要在摆角较的情况下进行实验。
(2)要使单摆在竖直平面内振动,不能使其形成摆或摆球转动,方法是摆球拉到一定位置后由释放。
(3)单摆的上端不要卷在夹子上,而要用夹子加紧,以免单摆摆动时摆线滑动或者摆长改变。
(4)测量摆长时,不能漏掉摆球的。
(5)测单摆周期时,应从摆球通过位置开始计时,在数到“零”的同时按下秒表开始计时计数。
计时从平衡位置开始是因为此处摆球的速度最大,人在判定它经过此位置的时刻,产生的计时误差较小。
要测量30次到50次全振动的时间,然后取值计算出一次全振动的时间,即为单摆的振动周期。
(三)数据的处理
先通过数据分析,对周期和摆长的定量关系做出猜测,例如可能是
、
,或者
、
……然后按照猜测来确定纵坐标轴和横坐标轴。
例如,我们通过简单的估算,认为很可能是
,那么可以用纵坐标表示T,横坐标表示
,作出图象。
如果这样作出的图象确实是一条直线,说明的确有
的关系,否则再做其他尝试。
(四)实验结论
单摆的周期与摆长的平方根成正比。
单摆的周期
(一)单摆的周期公式
实验证明单摆的周期与振幅A 关,与质量m 关,随摆长的增大而增大,随重力加速度g的增大而减小。
荷兰物理学家惠更斯总结出单摆周期公式:
(二)单摆的等时性
在小振幅摆动时,单摆的振动周期与 无关的性质称为单摆的等时性利用单摆振动周期与振幅无关的等时性,可制成计时仪器,如摆钟等。
由单摆周期公式知道,调节 即可调节钟表的快慢。
(三)等效摆长与等效重力加速度
在有些振动系统中
不一定是绳长,g也不一定为9.8m/s2,因此出现了等效摆长和等效重力加速度的问题。
(1)等效摆长
如图所示,三根等长的绳
共同系住一密度均匀的小球m,球直径为d。
与天花板的夹角
若摆球在纸面内做小角度的左右摆动,则摆动圆弧的圆心在
处,故等效摆长
,周期
;
若摆球做垂直纸面的小角度摆动,则摆动圆弧的圆心在O处,故等效摆长为
,周期
。
(2)等效重力加速度
①公式中的g由单摆所在的空间位置决定。
由
知,g随地球表面不同位置、不同高度而变化,在不同星球上也不相同,因此应求出单摆所在处的
代入公式,即g不一定等于9.8m/s2。
②g还由单摆系统的运动状态决定。
单摆处在向上加速发射的航天飞机内,设加速度为a,此时摆球处于超重状态,沿圆弧切线方向的回复力变大,摆球质量不变,则重力加速度的等效值
。
若单摆若在轨道上运行的航天飞机内,摆球完全失重,回复力为零,则等效值
,所以周期为无穷大,即单摆不摆动了。
当单摆有水平加速度a时(如加速运动的车厢内),等效重力加速
,平衡位置已经改变。
③g还由单摆所处的物理环境决定。
如带电小球做成的单摆在竖直方向的匀强电场中,回复力应是力和
力的合力在圆弧切线方向的分力,所以也有等效值
的问题。
用单摆测当地的重力加速度
(一)实验目的
利用单摆测定当地的重力加速度
(二)实验器材
铁架台(带铁夹)一个,中心有孔的金属小球一个,长约1m的细线一条,毫米刻度尺一根,游标卡尺(选用),秒表一块
(三)实验原理
单摆在偏角很小时的振动是简谐运动,振动周期跟偏角的大小和摆球的质量无关,这时单摆的周期公式是
,变换这个公式可得
。
因此只要
测出单摆的 和 ,即可求出当地的重力加速度g的值。
(四)实验步骤
(1)在细线的一端打一个比小球上的孔径稍大些的结,将细线穿过球上的小孔,制成一个单摆。
(2)将铁夹固定在铁架台的上端,铁架台放在实验桌边,使铁夹伸到桌面以外,把做好的单摆固定在铁夹上,使摆线自由下垂。
(3)测量单摆的摆长
:
用游标卡尺测出摆球直径2r,再用米尺测出从悬点至小球上端的悬线长
,则摆长
(4)把单摆从平衡位置拉开一个小角度,使单摆在竖直平面内摆动,用秒表测量单摆完成全振动30至50次所用的时间t,求出完成一次 所用的平均时间,这就是单摆的周期T。
(5)重复上述步骤,将每次对应的摆长
、周期T填于表中,按公式
算出每次g值,然后求出结果。
摆长
(m)
振动次数
n(s)
N次历时
t(s)
周期
T(s)
(m/s2)
g
平均值
1
2
3
(五)注意事项
(1)选择材料时摆线应选择而不易的线,长度一般不应短于1m;
小球应选用密度较的金属球,直径应较,最好不超过2cm;
(2)单摆悬线的上端不可随意卷在铁夹的杆上,应夹紧在铁夹中,以免摆动时发生摆线下滑、摆长改变的现象;
(3)摆动时控制摆线偏离竖直方向不超过10°
;
(4)摆动时,要使之保持在同一个运动平面内,不要形成摆;
(5)计算单摆的振动次数时,应在摆球通过位置时开始计时,以后摆球从同一方向通过最低位置时进行读数,且在数“零”的同时按下秒表,开始计时计数;
(6)由公式
可以得出k= ,因此对数据的处理
可采用图象的方法。
如图所示,作出
的图象,图象应是一条通过原点的直线,求出图线的 ,即可求得g值。
这样可以减小误差。
受迫振动和振动的能量
(一)阻尼振动与无阻尼振动
振幅逐渐减小的振动叫阻尼振动;
振幅不变的振动为等幅振动,也叫无阻尼振动。
(二)振动系统的能量
(1)对于给定的振动系统,振动的动能由振动的 决定,振动的势能由振动的 决定,振动的能量就是振动系统在某个状态下的动能与势能之和。
(2)对于同一振动系统,它的机械能大小由 大小决定,振幅越大,机械能就越 。
若无能量损失,简谐运动过程中机械能守恒,为等幅振动。
(三)受迫振动
振动系统在 力作用下的振动叫受迫振动。
受迫振动稳定时,系统振动的频率等于 的频率,跟系统的固有频率关。
受迫振动不是系统内部动能和势能的转化,而是与外界时刻进行着能量交换,系统的机械能也时刻变化。
(四)共振
在受迫振动中,当驱动力的频率 振动系统的固有频率时,振动物体的振幅最 ,这种现象叫做共振。
声音的共振现象叫做共鸣。
共振曲线如图所示:
在需要利用共振时,应使驱动力的频率接近或 振动物体的固有频率;
在需要防止共振时,应使驱动力的频率与振动物体的固有频率不同,而且相差越 越好。
 升级会员
升级会员 