单片机控制舵机思想.doc
《单片机控制舵机思想.doc》由会员分享,可在线阅读,更多相关《单片机控制舵机思想.doc(15页珍藏版)》请在冰点文库上搜索。
在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。
舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。
舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。
其工作原理是:
控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。
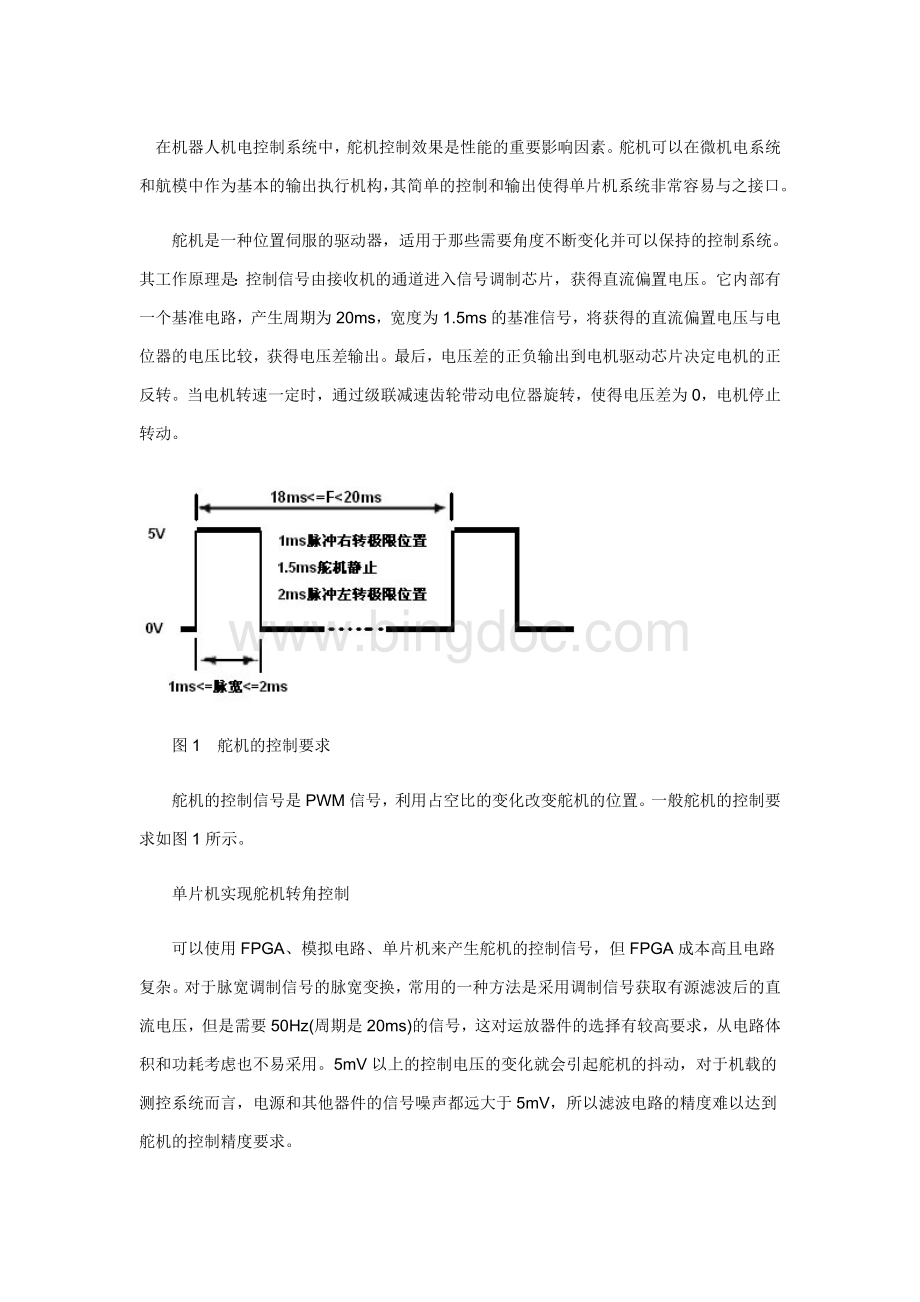
它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
图1 舵机的控制要求
舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。
一般舵机的控制要求如图1所示。
单片机实现舵机转角控制
可以使用FPGA、模拟电路、单片机来产生舵机的控制信号,但FPGA成本高且电路复杂。
对于脉宽调制信号的脉宽变换,常用的一种方法是采用调制信号获取有源滤波后的直流电压,但是需要50Hz(周期是20ms)的信号,这对运放器件的选择有较高要求,从电路体积和功耗考虑也不易采用。
5mV以上的控制电压的变化就会引起舵机的抖动,对于机载的测控系统而言,电源和其他器件的信号噪声都远大于5mV,所以滤波电路的精度难以达到舵机的控制精度要求。
也可以用单片机作为舵机的控制单元,使PWM信号的脉冲宽度实现微秒级的变化,从而提高舵机的转角精度。
单片机完成控制算法,再将计算结果转化为PWM信号输出到舵机,由于单片机系统是一个数字系统,其控制信号的变化完全依靠硬件计数,所以受外界干扰较小,整个系统工作可靠。
单片机系统实现对舵机输出转角的控制,必须首先完成两个任务:
首先是产生基本的PWM周期信号,本设计是产生20ms的周期信号;其次是脉宽的调整,即单片机模拟PWM信号的输出,并且调整占空比。
当系统中只需要实现一个舵机的控制,采用的控制方式是改变单片机的一个定时器中断的初值,将20ms分为两次中断执行,一次短定时中断和一次长定时中断。
这样既节省了硬件电路,也减少了软件开销,控制系统工作效率和控制精度都很高。
具体的设计过程:
例如想让舵机转向左极限的角度,它的正脉冲为2ms,则负脉冲为20ms-2ms=18ms,所以开始时在控制口发送高电平,然后设置定时器在2ms后发生中断,中断发生后,在中断程序里将控制口改为低电平,并将中断时间改为18ms,再过18ms进入下一次定时中断,再将控制口改为高电平,并将定时器初值改为2ms,等待下次中断到来,如此往复实现PWM信号输出到舵机。
用修改定时器中断初值的方法巧妙形成了脉冲信号,调整时间段的宽度便可使伺服机灵活运动。
为保证软件在定时中断里采集其他信号,并且使发生PWM信号的程序不影响中断程序的运行(如果这些程序所占用时间过长,有可能会发生中断程序还未结束,下次中断又到来的后果),所以需要将采集信号的函数放在长定时中断过程中执行,也就是说每经过两次中断执行一次这些程序,执行的周期还是20ms。
软件流程如图2所示。
如图2产生PWM信号的软件流程
如果系统中需要控制几个舵机的准确转动,可以用单片机和计数器进行脉冲计数产生PWM信号。
脉冲计数可以利用51单片机的内部计数器来实现,但是从软件系统的稳定性和程序结构的合理性看,宜使用外部的计数器,还可以提高CPU的工作效率。
这个比较简单吧,驱动普通舵机只要一个口线直接接舵机信号线就行了。
软件上可以用“分时复用比较法(我自己想的名字)”来做。
简单来说就是:
设置一个定时器让它按舵机最小分辨率的周期来溢出,
溢出后让某个寄存器从1开始到最大值不断重复,这个最大值不一定是0FFH,
可以根据自己的需要设。
每次定时器溢出的时候进入中断,
寄存器加1后和每个舵机的预设值进行比较,判断是否改变高电平的宽度。
这个比较一般只能处理不多的几路(要保证在下个定时器中断前完成比较)。
因为舵机信号的脉宽最大只有2.5MS,
在处理这几路舵机的时候把其它的舵机信号都拉低。
当处理完这几路的时候,
也就是定时器从1到最大值完成一次后,
(这时候前面处理过的几路应该都是低电平了)
把下次需要处理的几路都拉高。
然后再比较这几路该什么时候拉低,
依次循环,直到总时间达到20MS,再回过头来处理刚开始处理的几路。
本文下载地址:
在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。
舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。
目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。
舵机是一种俗称,其实是一种伺服马达。
其工作原理是:
控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。
它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。
就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。
3. 舵机的控制:
舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。
以180度角度伺服为例,那么对应的控制关系是这样的:
0.5ms--------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;
请看下形象描述吧:
这只是一种参考数值,具体的参数,请参见舵机的技术参数。
小型舵机的工作电压一般为4.8V或6V,转速也不是很快,一般为0.22/60度或0.18/60度,所以假如你更改角度控制脉冲的宽度太快时,舵机可能反应不过来。
如果需要更快速的反应,就需要更高的转速了。
要精确的控制舵机,其实没有那么容易,很多舵机的位置等级有1024个,那么,如果舵机的有效角度范围为180度的话,其控制的角度精度是可以达到180/1024度约0.18度了,从时间上看其实要求的脉宽控制精度为2000/1024us约2us。
如果你拿了个舵机,连控制精度为1度都达不到的话,而且还看到舵机在发抖。
在这种情况下,只要舵机的电压没有抖动,那抖动的就是你的控制脉冲了。
而这个脉冲为什么会抖动呢?
当然和你选用的脉冲发生器有关了。
一些前辈喜欢用555来调舵机的驱动脉冲,如果只是控制几个点位置伺服好像是可以这么做的,可以多用几个开关引些电阻出来调占空比,这么做简单吗,应该不会啦,调试应该是非常麻烦而且运行也不一定可靠的。
其实主要还是他那个年代,单片机这东西不流行呀,哪里会哟!
使用传统单片机控制舵机的方案也有很多,多是利用定时器和中断的方式来完成控制的,这样的方式控制1个舵机还是相当有效的,但是随着舵机数量的增加,也许控制起来就没有那么方便而且可以达到约2微秒的脉宽控制精度了。
听说AVR也有控制32个舵机的试验板,不过精度能不能达到2微秒可能还是要泰克才知道了。
其实测试起来很简单,你只需要将其控制信号与示波器连接,然后让试验板输出的舵机控制信号以2微秒的宽度递增。
为什么FPPA就可以很方便地将脉宽的精度精确地控制在2微秒甚至2微秒一下呢。
主要还是delaymemory这样的具有创造性的指令发挥了功效。
该指令的延时时间为数据单元中的立即数的值加1个指令周期(数据0出外,详情请参见delay指令使用注意事项)因为是8位的数据存储单元,所以memory中的数据为(0~255),记得前面有提过,舵机的角度级数一般为1024级,所以只用一个存储空间来存储延时参数好像还不够用的,所以我们可以采用2个内存单元来存放舵机的角度伺服参数了。
所以这样一来,我们可以采用这样
舵机驱动的应用场合:
1. 高档遥控仿真车,至少得包括左转和右转功能,高精度的角度控制,必然给你最真实的驾车体验.
2. 多自由度机器人设计,为什么日本人设计的机器人可以上万RMB的出售,而国内设计的一些两三千块也卖不出去呢,还是一个品质的问题.
3. 多路伺服航模控制,电动遥控飞机,油动遥控飞机,航海模型等
传统舵机、数字舵机与纯数字舵机
传统舵机的控制方式以20ms为一个周期,用一个1.5ms±0.5ms的脉冲来控制舵机的角度变化,随着以CPU为主的数字革命的兴起,现在的舵机已成为模拟舵机和数字舵机并存的局面,但即使是现在的数字舵机,其控制接口也还是传统的1.5ms±0.5ms的模拟控制接口,只是控制芯片不再是普通的模拟芯片而已;不能完全发挥现代数字化控制的优势,这在传统的遥控竞赛等领域,为了保持产品的兼容性,不得不保留模拟接口,而在一些新兴的领域完全可以采用新型的全数字接口的纯数字舵机。
纯数字舵机采用全新的单线双工通讯协议,不仅能执行普通舵机的全部功能,还可以作为一个角度传感器,监测舵机的实际位置,而且可以多个舵机并联互不影响。
在未来的自动化控制领域有着不可估量的优势。
采用纯数字舵机构建的自动化控制系统,不仅可以大幅提升系统性能,而且可以降低系统的生产维护成本,提高产品性价比,增强市场竞争力。
简单认识数码舵机
一个数十元的伺服器与数百元的伺服器在外表上并没有多大的分别,但是数码化舵机比上一代传统的普通舵机有更快的反应、更精确以及更为紧凑的效率。
为何数码是较佳的?
一个数码化的舵机内置了微型的处理器,这正是数码舵机优点所在。
这个微型处理器可以因应所接收的讯号而作出指令,至於传统的舵机则经常只是检查自己的位置是否正确并作出更正。
传统的舵机将指令的动作传至输出轴,指令是来自接收器的脉冲,每秒每秒中约有四十至五十次的调整。
但是数码化舵机的输出轴每秒约有三百次的调整,足足较传统的伺服器,快了六倍之多·这也表示了数码舵机调整输出轴的位置较传统的达六倍之多,所以它肯定是较传统的舵机有更快的反应。
这个快速的更正也可以让你感觉到舵机是较为“强”的、如果你尝试去扭动已启动的数码舵机输出臂离开指令位置的话的话,你会发觉它有更强的能力去保持原来的位置,这也是由於舵机非常迅速地为输出轴的位置作出更正调节。
这正适合模型需要强大的回中能力。
传统的舵机要在偏离原来指定的位置较远才能发挥较大的扭力,相反地,数码舵机的输出轴只要略略偏离指令的位置便能够发挥最大的扭力,所以它能够提供较大的动力以及更为精确。
当你启动了数码舵机之後,它会发觉他不断发出齿轮的声音,这表示了它正在努力地去将输出轴维持在命令的位置。
数码舵机不能与普通舵机混合使用
在更换舵机的时候请注意,如果你的直升机或飞机使用的是普通舵机,那么在更换其中某个舵机的时候,不能将普通舵机与数码舵机混合使用.要么全部使用普通舵机,要么全部使用数码舵机。
数码舵机的简介
一个数十元的伺服器与数百元的伺服器在外表上并没有多大的分别,但是数码化舵机比上一代传统的普通舵机有更快的反应、更精确以及更为紧凑的效率。
为何数码是较佳的?
一个数码化的舵机内置了微型的处理器,这正是数码舵机优点所在。
这个微型处理器可以因应所接收的讯号而作出指令,至於传统的舵机则经常只是检查自己的位置是否正确并作出更正。
传统的舵机将指令的动作传至输出轴,指令是来自接收器的脉冲,每秒每秒中约有四十至五十次的调整。
但是数码化舵机的输出轴每秒约有三百次的调整,足足较传统的伺服器,快了六倍之多·这也表示了数码舵机调整输出轴的位置较传统的达六倍之多,所以它肯定是较传统的舵机有更快的反应。
这个快速的更正也可以让你感觉到舵机是较为“强”的、如果你尝试去扭动已启动的数码舵机输出臂离开指令位置的话的话,你会发觉它有更强的能力去保持原来的位置,这也是由於舵机非常迅速地为输出轴的位置作出更正调节。
这正适合模型需要强大的回中能力。
传统的舵机要在偏离原来指定的位置较远才能发挥较大的扭力,相反地,数码舵机的输出轴只要略略偏离指令的位置便能够发挥最大的扭力,所以它能够提供较大的动力以及更为精确。
当你启动了数码舵机之後,它会发觉他不断发出齿轮的声音,这表示了它正在努力地去将输出轴维持在命令的位置。
舵机的性能及安装
舵机是遥控模型无线电操纵系统中很重要的部件。
如果不了解它的性能,不讲究正确的安装方法,轻则影响模型的飞行姿态,重则如果卡住模型则无法操纵,造成事故的发生。
所以,在使用舵机前,了解它的性能和安装方法是必要的。
日前市场上出售的模型舵机,主要是比例式的,类型有普通型、超小型,强力型和特殊用途型等几种。
下面分别介绍一下它们各自的性能。
普通型:
45克,0.2秒/60度,力矩3千克·厘米。
这种舵机各方面性能都比较适中,一般用在尺寸不是很大的P3A-1、2和P2B-1、2等模型上。
超小型:
20克,0.15秒/60度,力矩2千克·厘米。
它的体积小、重量轻,输出力矩小,通常用于小尺寸、舵面阻力相对小的模型上,如P5A、小型电动类模型等。
强力型:
100克,0.2秒/60度,力矩9千克·厘米。
这种舵机输出力矩大,可以克服高速、大舵面带来的阻力大的缺点。
主要用于尺寸和飞行重量大,速度快,舵面阻力大的模型,如F3A、大型仿真飞机模型、现代特技飞机模型、喷射模型飞机和F4级模型等。
特殊用途型:
多数特殊用途的舵机,其性能与强力型相似。
通常用于专项任务,如收索机(帆船)、起落架蛇机等。
另外,还有—些耐高温和可防水的舵机,主要用于科学研究和工业方面,一般模型很少采用,但近年来这种舵机随着模型产品的发展在民用模型领域发展迅速。
—般的舵机内部的电路和齿轮等零什都是很精细的,自己较难制作,多采用成品舵机。
日产成品舵机品质较好,剩余功率大,不易打齿、比较耐用。
国产舵机质量有的也不错。
安装舵机也很重要,安装方法主要有三种:
(1)用胶直接把舵机粘在模型上。
要求帖接技术较高,不能更换,通常用于一些简单模型。
(2)对好舵机两边的安装孔,用螺钉固定。
这种方法的好处是容易更换。
(3)利用配套的固定片及减震片固定。
对丁装大容积内燃机的模型,为了减少振动对舵机的损害,多
采用这种方法。
舵机的安装位置应尽量靠近模型的重心。
有条件时,舵机和接收机应尽量分别使用电源。
电源电压不足时,应立即更换,以免舵机操纵失灵导致空中停机。
舵机输出盘(摇臂)不同的角度和力臂孔,应尽量选择力臂大的,这样可以减小舵机负荷。
输出盘与舵面,可以专用联杆或钢丝连接,前者效果较好
最后说明一下,对于—些电动模型的动力电机控制,原来用一个舵机作开关,但作用不大,后来有些人用直接粘一个电位器的办法来对电机进行无级操纵。
现在,有些厂家已生产出成品的无级变速器(现在叫电调),直接插在一个通道中,对电机进行加、减速等无级控制,既轻巧,又经济。
不过,为了考虑车、船模使用,变速器有顺、逆转功能,而在航模上只允许用顺转功能。
因此,用在航模上时,最好请专人对它的电路进行一下改装,防止操纵失误。
变速器最好单用一组动力电源,如果同时使用接枚机电源,将会影响接收机的工作和舵机的动作
机器人机电控制系统中的舵机
1. 什么是舵机:
在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。
舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。
目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。
舵机是一种俗称,其实是一种伺服马达。
还是看看具体的实物比较过瘾一点:
2. 其工作原理是:
控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。
它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。
就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。
. 舵机的控制:
3要精确的控制舵机,其实没有那么容易,很多舵机的位置等级有1024个,那么,如果舵机的有效角度范围为180度的话,其控制的角度精度是可以达到180/1024度约0.18度了,从时间上看其实要求的脉宽控制精度为2000/1024us约2us。
如果你拿了个舵机,连控制精度为1度都达不到的话,而且还看到舵机在发抖。
在这种情况下,只要舵机的电压没有抖动,那抖动的就是你的控制脉冲了。
而这个脉冲为什么会抖动呢?
当然和你选用的脉冲发生器有关了。
一些前辈喜欢用555来调舵机的驱动脉冲,如果只是控制几个点位置伺服好像是可以这么做的,可以多用几个开关引些电阻出来调占空比,这么做简单吗,应该不会啦,调试应该是非常麻烦而且运行也不一定可靠的。
其实主要还是他那个年代,单片机这东西不流行呀,哪里会哟!
使用传统单片机控制舵机的方案也有很多,多是利用定时器和中断的方式来完成控制的,这样的方式控制1个舵机还是相当有效的,但是随着舵机数量的增加,也许控制起来就没有那么方便而且可以达到约2微秒的脉宽控制精度了。
听说AVR也有控制32个舵机的试验板,不过精度能不能达到2微秒可能还是要泰克才知道了。
其实测试起来很简单,你只需要将其控制信号与示波器连接,然后让试验板输出的舵机控制信号以2微秒的宽度递增。
为什么FPPA就可以很方便地将脉宽的精度精确地控制在2微秒甚至2微秒一下呢。
主要还是delaymemory这样的具有创造性的指令发挥了功效。
该指令的延时时间为数据单元中的立即数的值加1个指令周期(数据0出外,详情请参见delay指令使用注意事项)因为是8位的数据存储单元,所以memory中的数据为(0~255),记得前面有提过,舵机的角度级数一般为1024级,所以只用一个存储空间来存储延时参数好像还不够用的,所以我们可以采用2个内存单元来存放舵机的角度伺服参数了
舵机的构造和原理(转)
2009-08-0909:
28
前言
舵机是遥控模型控制动作的动力来源,不同类型的遥控模型所需的舵机种类也随之不同。
如何审慎地选择经济且合乎需求的舵机,也是一门不可轻忽的学问。
本文章主要探讨适合各等级直升机各工作部位所使用的舵机,至於其它种类的模型,如飞机、车、船,则不在本篇文章讨论范围之内。
舵机的构造
舵机主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。
其工作原理是由接收机发出讯号给舵机,经由电路板上的IC判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回讯号,判断是否已到达定位。
位置检测器其实就是可变电阻,当舵机转动时电阻值也会跟着改变,测量电阻值便可知转动的角度。
一般的伺服马达是将细铜线缠绕在三极转子上,当电流流过线圈时便会产生磁场,与转子外围的磁铁产生排斥作用,进而产生转动的作用力。
依据物理学原理,物体的转动惯量与质量成正比,因此要转动质量愈大的物体,所需的作用力也愈大。
舵机为求转速快、耗电小,於是将细铜线缠绕成极薄的中空圆柱体,形成一个重量极轻的五极中空转子,并将磁铁置於圆柱体内,这就是无核心马达。
为了适合不同的工作环境,有防水及防尘设计的舵机。
并且因应不同的负载需求,舵机的齿轮有塑胶及金属的区分。
较高级的舵机会装置滚珠轴承,使得转动时能更轻快精准。
滚珠轴承有一颗及二颗的区别,当然是二颗的比较好。
目前新推出FET舵机,主要是采用FET(FieldEffectTransistor)场效电晶体。
FET具有内阻低的优点,因此电流损耗比一般电晶体少。
技术规格
厂商所提供的舵机规格资料,都会包含外形尺寸(cm)、扭力(kg/cm)、速度(秒/60。
)、测试电压(V)及重量(g)等基本资料。
扭力的单位是kg-cm,意思是在摆臂长度1公分处,能吊起几公斤重的物体。
这就是力臂的观念,因此摆臂长度愈长,则扭力愈小。
速度的单位是sec/60。
,意思是舵机转动60。
所需要的时间。
电压会直接影响舵机的性能,例如FutabaS-9001在4.8V时扭力为3.9kg、速度为0.22秒,在6.0V时扭力为5.2kg、速度为0.18秒。
若无特别注明,JR的舵机都是以4.8V为测试电压,Futaba则是以6.0V作为测试电压。
所谓天下没有白吃的午餐,速度快、扭力大的舵机,除了价格贵,还会伴随着高耗电的特点。
因此使用高级的舵机时,务必搭配高品质、高容量的镍镉电池,能提供稳定且充裕的电流,才可发挥舵机应有的性能。
选择舵机
标准的直升机需搭配5颗舵机,分别控制油门、副翼、升降舵、螺距及尾舵。
油门
油门是所有动作中负载最轻的部位,且负载不会受到外在因素的影响而改变,所以选择油门舵机时,扭力不是问题(1kg就绰绰有馀),速度才是关键。
因为直升机的油门与螺距作混控,故油门与螺距舵机的速度最好要一致,才不会发生螺距舵机已到达定位,油门舵机却姗姗来迟的情况。
尤其作剧烈的3D飞行时,油门与螺距的变化量极大,若油门与螺距舵机的速度不协调,会发生马力延迟的状况。
油门舵机的速度并不是愈快愈好,因为还要考虑引擎的反应时间。
引擎必须经过吸气、压缩、爆炸、排气这一连串的步骤,尤其直升机用的引擎并不属於高转速型,因此舵机的速度如果太快,就会产生引擎运转速度跟不上舵机的动作,进而出现油气混合比不适当的状况。
建议采用速度为0.19~0.24秒的舵机。
副翼及升降舵
30级及46级的直升机选择扭力3kg以上的舵机,60级的直升机则选择扭力5kg以上的舵机。
副翼及升降舵的反应速度,主要是由主旋翼转速及平衡翼片的重量所控制,与舵机的速度快慢,较无明显且直接的关联,所以不需使用太快的舵机。
建议采用速度为0.20~0.26秒的舵机。
螺距
直升机的主旋翼螺距是出了名的重负载,因此螺距舵机的扭力一定要够,最好能选择扭力5kg以上的舵机。
建议采用速度为0.19~0.24秒的舵机。
尾舵
尾舵舵机的扭力不需太大,3kg就已经足够了。
请依据您所使用的陀螺仪等级来搭配尾舵舵机。
机械式陀螺仪因为反应速度较慢,因此无需使用高速舵机。
压电式陀螺仪需搭配高速舵机,才能发挥陀螺仪的性能。
高级的陀螺仪都会指明建议使用的舵机,例如JR5000T陀螺仪建议搭配NES-8700G舵机,FutabaGY-501陀螺仪建议搭配S-9205舵机。
若您使用的压电式陀螺仪并无特别指明舵机的类型,建议您购买速度愈快的舵机愈好。
如何以最经济的方式购买合用的舵机,请叁考下列步骤:
1.先决定螺距舵机,选择扭力5kg以上的舵机,再依据预算的多寡决定舵机的速度。
2.依照螺距舵机的
 升级会员
升级会员 