国家开放大学《Matlab语言及其应用》实验报告(第七章--典型机械系统的Matlab 辅助分析).docx
《国家开放大学《Matlab语言及其应用》实验报告(第七章--典型机械系统的Matlab 辅助分析).docx》由会员分享,可在线阅读,更多相关《国家开放大学《Matlab语言及其应用》实验报告(第七章--典型机械系统的Matlab 辅助分析).docx(2页珍藏版)》请在冰点文库上搜索。
国家开放大学《Matlab语言及其应用》实验报告
——典型机械系统的Matlab辅助分析
实验名称
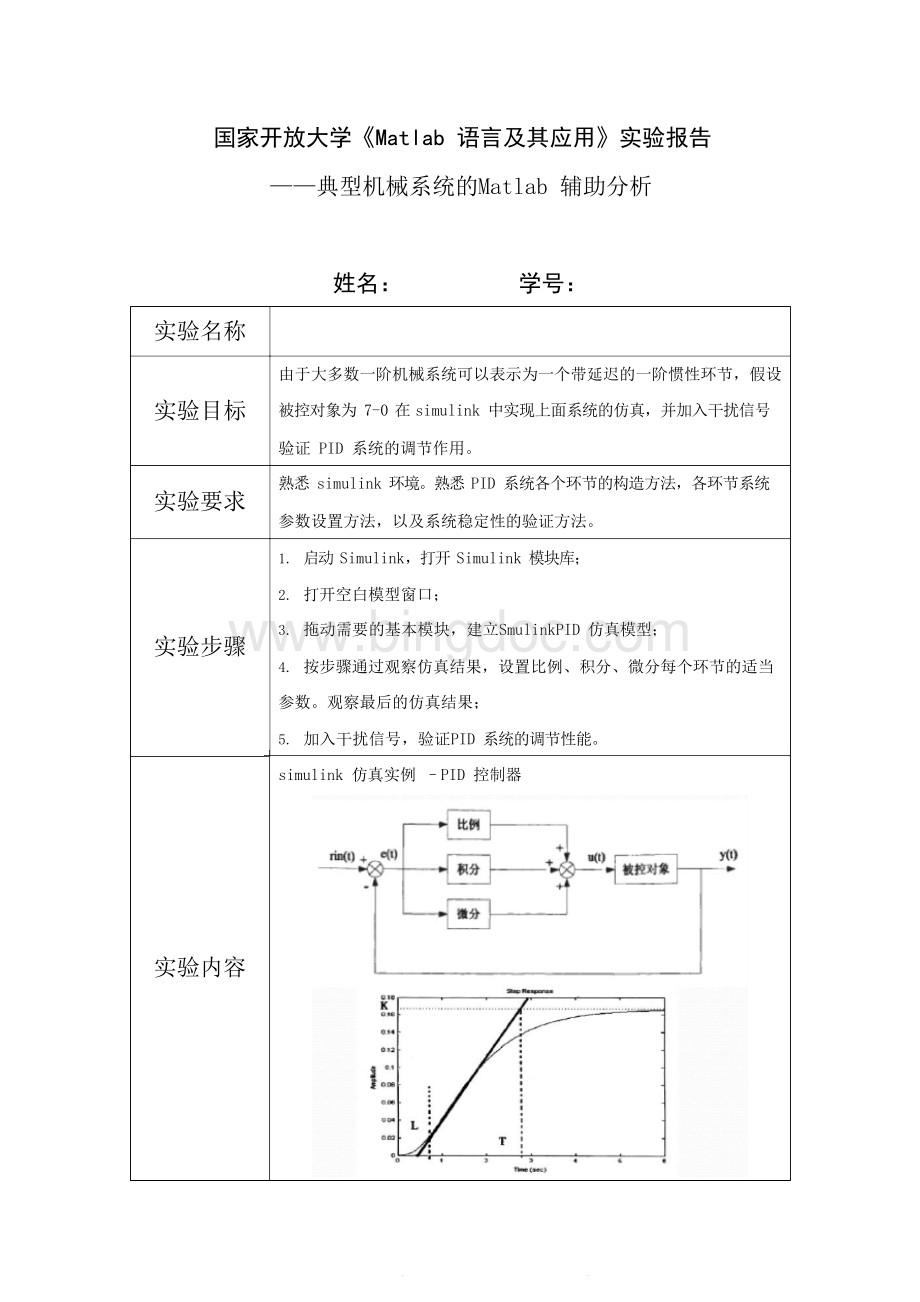
由于大多数一阶机械系统可以表示为一个带延迟的一阶惯性环节,假设
实验目标
被控对象为7-0在simulink中实现上面系统的仿真,并加入干扰信号
验证PID系统的调节作用。
熟悉simulink环境。
熟悉PID系统各个环节的构造方法,各环节系统
实验要求
参数设置方法,以及系统稳定性的验证方法。
1.启动Simulink,打开Simulink模块库;
2.打开空白模型窗口;
3.拖动需要的基本模块,建立SmulinkPID仿真模型;
实验步骤
4.按步骤通过观察仿真结果,设置比例、积分、微分每个环节的适当
参数。
观察最后的仿真结果;
5.加入干扰信号,验证PID系统的调节性能。
simulink仿真实例–PID控制器
实验内容
姓名:
学号:
【例】由于大多数一阶系统可以表示为一个带延迟的一阶
惯性环节,假设被控对象为
G(s)=360
8
−180
+1
请在simulink下实现对该系统的PID控制。
 升级会员
升级会员 