中考物理必考25个实验考学练 实验15 探究杠杆平衡条件的实验解析版.docx
《中考物理必考25个实验考学练 实验15 探究杠杆平衡条件的实验解析版.docx》由会员分享,可在线阅读,更多相关《中考物理必考25个实验考学练 实验15 探究杠杆平衡条件的实验解析版.docx(16页珍藏版)》请在冰点文库上搜索。
中考物理必考25个实验考学练实验15探究杠杆平衡条件的实验解析版
实验十五探究杠杆平衡条件的实验
【探究目的】:
杠杆的平衡条件
【实验器材】:
杠杆、钩码盒一套、弹簧测力计、细线、刻度尺;
【探究假设】:
杠杆的平衡可能与“动力和力臂的乘积”、“阻力和阻力臂的乘积”有关。
【实验步骤】:
调节杠杆两端的平衡螺母,使横梁平衡。
在杠杆的左右两端分别用细线依次悬挂个数不同钩码【每一个钩50g=0.05kg,重为:
G=mg=0.05kg×10N/kg=0.5N】,(假设左端砝码的重力产生的拉力为阻力F2,右端钩码的重力产生的拉力为动力F1,)先固定F1大小和动力臂l1的大小,再选择适当的阻力F2,然后移动阻力作用点,改变阻力臂l 2大小,直至杠杆平衡,分别记录下此时动力F1、动力臂l1、阻力F2和阻力臂l 2的数值,并将实验数据记录在表格中。
固定F1大小和动力臂l1的大小,改变阻力F2的大小,在移动阻力作用点,改变阻力臂l 2大小,直至杠杆平衡,记录下此时的阻力F2和阻力臂l 2的数值,并填入到实验记录表格中。
改变动力F1的大小,保持动力臂l1的大小以及阻力F2大小不变,再改变阻力F2作用点,直至杠杆重新平衡,记录下此时动力F1大小和阻力臂l 2的大小,并填入到实验数据记录表。
整理实验器材。
【数据记录】:
实验数据记录表如下:
动力F1(N)
动力臂l1(cm)
动力×动力臂(NM
阻力F2(N)
阻力臂l2(cm)
阻力×阻力臂(N•m)
步骤2
步骤3
步骤4
【实验结论】:
根据实验记录数据,探究结论是:
动力×动力臂=阻力×阻力臂公式表示:
F1L1=F2L2
思考:
在上述探究实验中,为什么每次都要使杠杆在水平位置保持平衡?
答:
可以方便用刻度尺来直接测出实验中杠杆的力臂大小
【考点方向】:
1、实验前杠杆的调节:
左高右调,右高左调。
平衡后实验过程中不能在调节平衡螺母。
2、将杠杆调成水平平衡的目的是:
便于测量力臂
3、选择杠杆终点作为支点的好处:
消除杠杆自身重力对实验的影响。
4、将砝码换成测力计的好处是:
能直接测出拉力的大小,实验操作方便。
5、将砝码换成测力计的缺点是:
测力计本身有重量,对实验有一定的影响,使弹簧测力计的示数变大。
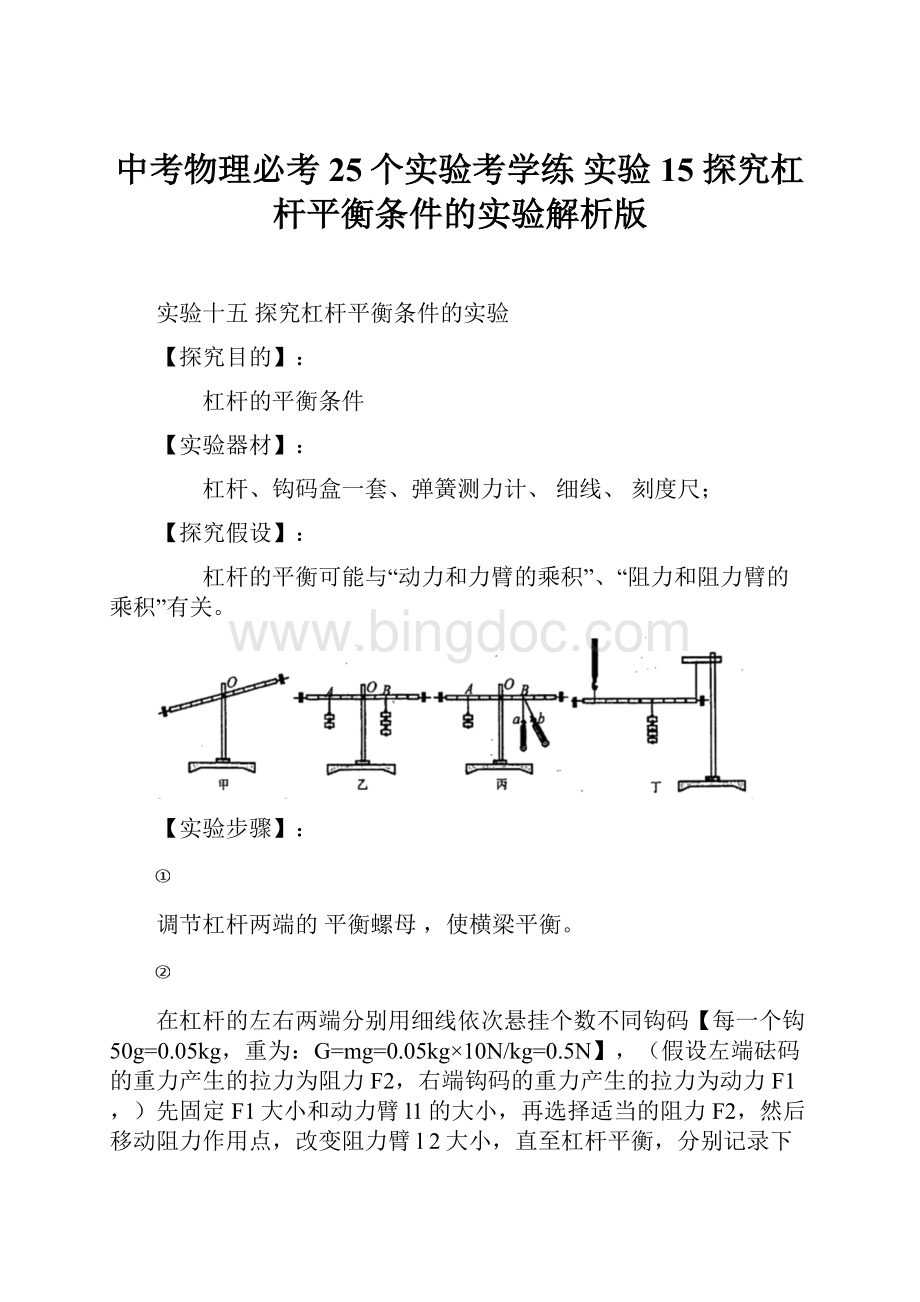
6、如上图,乙图和丙图中,弹簧测力计的示数作怎样变化:
由大变小,原因是力臂由小变大。
7、你认为哪个图更合理?
答:
丁图,实验不受弹簧测力计的重力的影响。
8、使用弹簧测力计代替钩码最终目的是:
更能正确认识力臂。
9、多次实验的目的是:
避免实验的偶然性,是结论具有普遍规律。
【经典例题】:
【母题】:
小红和小明利用如图所示装置探究杠杆的平衡条件.
(1)若实验前杠杆静止如图甲所示,此时杠杆处于(选填“平衡状态”或“不平衡状态”),可将杠杆两端的平衡螺母向________(填“左”或“右”)调节,使杠杆在水平位置平衡.目的是.
(2)在实验过程中,调节杠杆在水平位置平衡的目的是________________.
(3)在杠杆两端加挂钩码,并移动钩码,使杠杆在水平位置平衡,测出力臂,多次实验并把数据记录在表格中.
次序
F1/N
l1/cm
F2/N
l2/cm
1
1
10
2
5
2
2
10
1
20
3
2
15
3
10
小明根据以上数据得出杠杆平衡条件是:
____________________________。
(4)杠杆调节平衡后,小红在杠杆上的A点处挂4个钩码,如图乙所示,为使杠杆在水平位置重新平衡,应在B点挂个钩码.如果将B处的钩码换成弹簧测力计,那么手对弹簧测力计的拉力(选填“大于”“等于”“小于”)六个钩码的重力。
(5)当杠杆平衡后,将A点和B点下方所挂的钩码同时向支点O靠近移一格,杠杆____________(填“左侧下降”“右侧下降”或“仍水平平衡”).
(6)如图丙所示,用弹簧测力计在C处竖直向上拉,使杠杆在水平位置平衡,当弹簧测力计在原位置逐渐向左倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将________(填“变大”“变小”或“不变”),原因是。
(7)小明实验时改变钩码的个数和位置进行了多次实验,其目的是________.
【答案】
(1)平衡状态;右;消除杠杆自身重力对实验的影响,水平位置便于直接读出力臂。
(2)便于测量力臂;
(3)F1L1=F2L2;
(4)6;小于;
(5)左侧下降;
(6)变大;根据平衡条件,动力臂变小。
(7)避免实验的偶然性,使结论更具普遍性。
【解析】
(1)若实验前杠杆如图甲所示,左端下沉,右端上翘,可将杠杆两端的平衡螺母向右调节,使杠杆在水平位置平衡,目的是消除杠杆自身重力对实验的影响,水平位置便于直接读出力臂。
(2)实验时让横杆AB在水平位置平衡,力臂在杠杆上便于测量力臂大小,杠杆的重心通过支点,可以消除杠杆重对杠杆平衡的影响;
(3)分析表格中的数据可得出杠杆平衡的条件是:
F1L1=F2L2;
(4)设杠杆每个格的长度为L,每个钩码的重力为G,根据杠杆的平衡条件:
FALA=FBLB,即4G×3L=FB×2L,解得FB=6G,需挂6个钩码;
如果将B处的钩码换成弹簧测力计,那么由于向下的力,有两个,一是弹簧测力计自身重力,另一个是手对弹簧测力计的拉力。
二者之和才等于六个钩码的重力。
(5)根据杠杆的平衡条件:
FALA=FBLB,若A、B两点的钩码同时向靠近支点的方向移动一个格,则左侧4G×2L=8GL,右侧6G×L=6GL,因为8GL>6GL,所以杠杆左端会下降;
(6)根据杠杆的平衡条件:
FALA=FBLB,阻力和阻力臂在不变的情况下,动力的方向向左倾斜时,动力臂会变小,因此会导致动力变大。
(7)小明实验时改变钩码的个数和位置进行了多次实验,能够避免一组数据的偶然性,多次测量才能得出普遍规律。
练习1:
(2019苏州)利用杠杆开展相关实验探究:
(1)安装好杠杆,将其放到水平位置后松手,发现杠杆沿顺时针方向转动,如图甲所示。
则应将平衡螺母向 (选填“左”或“右”)调节,直到杠杄在水平位置平衡;
(2)如图乙所示,在A点挂3个重力均为0.5N的钩码,在B点用弹簧测力计竖直向下拉杠杆,使其在水平位置平衡,弹簧测力计的示数为 N;若在第
(1)小题所描述的情形中未调节平衡螺母而直接开展上述实验,弹簧测力计的示数会 (选填“偏大”、“偏小”或“不变”);
(3)始终竖直向下拉弹簧测力计,使杠杆从水平位置缓慢转过一定角度,如图丙所示。
此过程中,弹簧测力计拉力的力臂 (选填“变大”、“变小”或“不变”,下同),拉力的大小 。
【答案】
(1)左;
(2)2.0;偏小;(3)变小;不变
【解析】
(1)安装好杠杆,将其放到水平位置后松手,发现杠杆沿顺时针方向转动,左端上翘,如图甲所示。
则应将平衡螺母向左调节,直到杠杄在水平位置平衡;
(2)由图可知,根据杠杆平衡条件得:
FA×LA=FB×LB,3×0.5N×4L=FB×3L,所以FB=2.0N;
若在第
(1)小题所描述的情形中未调节平衡螺母而直接开展上述实验,由于左侧已经存在杠杆的力与力臂的乘积,故弹簧测力计的示数会偏小;
(3)图丙使杠杆由水平位置时,根据杠杆平衡条件F1L1=F2L2得,
G×4L=F2×3L,
则F2=
G;
当转动到图中位置时,设杠杆与水平位置的夹角为α,物体的力臂、弹簧测力计拉力的力臂均变小;则根据杠杆平衡条件F1L1=F2L2得,
G×4L×cosα=F2′×3L×cosα,
则:
F2′=
G;
所以,在此过程中拉力F的大小不变。
练习2:
(2019聊城)下面是小聪利用刻度均匀的匀质杠杆进行探究“杠杆平衡条件”的实验。
(1)实验前为方便测量力臂,应将杠杆调节到位置平衡,将杠杆的中点置于支架上,当杠杆静止时,发现杠杆左端下沉,这时应将平衡螺母向(选“左”或“右”)端调节。
(2)调节平衡后,在杠杆B点处挂6个钩码,如图甲所示,则在A点处应挂个同样的钩码,杠杆仍然在水平位置平衡。
(3)图乙是小聪利用弹簧测力计做的某次实验情景,已知杠杆每格长5cm,钩码每个重0.5N,请将弹簧测力计的示数填入下表。
实验序号
动力F1/N
动力臂L1/m
阻力F2/N
阻力臂L2/m
1
______
0.15
3.0
0.10
上述实验数据不符合杠杆平衡条件,出现问题的原因是____。
【答案】
(1)水平;右;
(2)4;(3)3.8;弹簧测力计没有竖直向下拉。
【解析】
(1)实验前为方便测量力臂,应将杠杆调节到水平位置平衡,将杠杆的中点置于支架上,当杠杆静止时,发现杠杆左端下沉,右端偏高,这时应将平衡螺母向右端调节。
(2)如图甲所示,在杠杆B点处挂6个钩码,设在则在A点处应挂n个同样的钩码,杠杆仍然在水平位置平衡;
设每个钩码重为G,每个小格为L,根据杠杆的平衡条件F动l动=F阻l阻:
6G×2L=nG×3L,故n=4,
即在A点处应挂4个同样的钩码,杠杆仍然在水平位置平衡。
(3)弹簧测力计每一个大格代表1N,每一个小格代表0.2N,示数为3.8N。
弹簧测力计没有竖直向下拉,当弹簧测力计倾斜拉杠杆时,力臂变小,小于动力点到支点的距离,动力臂变小。
练习3:
(2019德阳)如图所示是探究杠杆平衡条件的几个实验情景:
(1)挂钩码前,杠杆在如图甲所示的位置静止,此时杠杆________(选填“达到”或“没有达到”)平衡状态,接下来调节杠杆两端的螺母,使杠杆处于________。
(2)如图乙所示,A点挂有2个质量均为50g的钩码、为了让杠杆在水平位置平衡,应在B点挂________个质量均为50g的钩码。
(3)如图丙所示,现给你一个量程为0~2N的弹簧测力计,若干个50g的钩码,钩码挂在C点处,现使用弹簧测力计和钩码使杠杆在水平位置平衡,则在C点处所挂钩码的最多个数为________个。
【答案】
(1)达到水平位置平衡;
(2)3;(3)6
【解析】
(1)杠杆保持静止,此时杠杆处于静止状态,达到平衡;
由图中,杠杆的右端较高,平衡螺母应向右端移动使杠杆在水平位置平衡;
(2)设杠杆的一个小格为L,一个钩码重为G,
因为,F1l1=F2l2,所以,2G×3L=nG×2L,所以,n=3,所以在B处挂3个钩码。
(3)为使拉力最小,动力臂要最长,拉力F的方向应该垂直杠杆向上,即竖直向上,动力臂为最长,F作用点在最左端,
根据杠杆的平衡条件,在C点处所挂钩码的最多个数:
nG×4L=F×6L,nmg×4L=F×6L,
代入数据:
n×0.05kg×10N/kg×4L=2N×6L,解得,n=6。
练习4:
(2019新疆兵团)在“探究杠杆的平衡条件”的实验中:
(1)实验前,杠杆静止时,发现杠杆左端低、右端高,此时杠杆处于______(填“平衡”或“非平衡”)状态,为使杠杆在水平位置平衡,应将杠杆右端的平衡螺母向______(填“左”或“右”)调节。
(2)调节杠杆在水平位置平衡后,进行如图所示的实验,用量程为5N的弹簧测力计在A点竖直向上拉(如图中M所示),杠杆在水平位置平衡时,弹簧测力计的示数为2.5N;若弹簧测力计斜向上拉(如图中N所示),杠杆在水平位置平衡时,弹簧测力计的示数为________(填“大于”或“小于”)2.5N,此时拉力的方向与竖直方向的最大夹角为________(填“30°”“45°”或“60°”)。
(3)杠杆上每个平衡螺母的质量为m,杠杆的总质量(含两个平衡螺母)为50m。
实验前,调节杠杆在水平平衡的过程中,若只将右端的平衡螺母移动了距离L,则调节前后杠杆(含两个平衡螺母)的重心在杆上移动的距离为_______(填“
”“
"或"
”)
【答案】
(1)平衡;
(2)右;大于;60°;(3)
;
【解析】
(1)杠杆静止时就是出于平衡状态;为了使杠杆在水平位置平衡,需要将高的一端的平衡螺母往外调,也就是将杠杆右端的平衡螺母往右调节。
(2)弹簧测力计在N位置时,力臂小于在M位置时,所以拉力大于2.5N;弹簧测力计的最大拉力为5N,所以力臂最短为在M位置时的,因此弹簧测力计与竖直方向夹角最大为60°。
(3)杠杆加平衡螺母质量总共为50m,其中质量为m的部分移动了L,则相当于整体的重心移动了
。
练习5:
(2019荆州)小华在做“探究杠杆平衡条件”实验的装置如图所示,杠杆上相邻刻线间的距离相等
(1)杠杆在如图甲所示的位置静止时____(选填“是”或“不是”)处于杠杆平衡状态的.
(2)为使杠杆在水平位置平衡,应将平衡螺母向_____(选填“左”或“右”)端调节.
(3)如图乙所示,杠杆在水平位置平衡后,在A点挂两个钩码,每个钩码重0.5N,在B点竖直向下拉弹簧测力计,仍使杠杆水平位置平衡,此时弹簧测力计的示数应为______N.当弹簧测力计改为斜拉时,再次使杠杆水平位置平衡,则弹簧测力计的示数将________.(选填“变大”、“变小”或“不变”)
(4)小华改变钩码的个数和位置进行了多次实验,其目的是____________.
【答案】
(1)是
(2)右(3)1.5N变大(4)使实验结论具有普遍性
【解析】
(1)杠杆处于静止或匀速转动都是处于平衡状态,该杠杆是静止所以处于杠杆平衡。
(2)实验前杠杆处于右端高的状态,为了方便实验测量力臂,应该使杠杆处于水平位置平衡,右端高,则应该把平衡螺母向右侧调节。
(3)杠杆处于平衡状态,则满足杠杆平衡的条件,动力臂×动力=阻力臂×阻力。
此处阻力是两个钩码,每个钩码是0.5N,两个钩码,则阻力是1N,阻力臂是3格,动力臂是两格,因此列平衡条件1N×3=F×2;得F=1.5N.
当弹簧测力计改为斜拉时,平衡后,由于动力臂会变小,动力臂和动力都不变,根据平衡条件,弹簧测力计的示数就会变大。
(4)实验过程中,多次改变钩码的个数和力臂的大小得到多组数据,可以避免实验的偶然性,使结论更具有普遍性。
练习6:
(2018枣庄)利用杠杆开展相关实验探究:
(1)安装好杠杆,将其放到水平位置后松手,发现杠杆沿顺时针方向转动,如图甲所示。
则应将平衡螺母向______(选填“左”或“右”)调节,直到杠杄在水平位置平衡;
(2)如图乙所示,在A点挂3个重力均为0.5N的钩码,在B点用弹簧测力计竖直向下拉杠杆,使其在水平位置平衡,弹簧测力计的示数为______N;若在第
(1)小题所描述的情形中未调节平衡螺母而直接开展上述实验,弹簧测力计的示数会______(选填“偏大”、“偏小”或“不变”);
(3)始终竖直向下拉弹簧测力计,使杠杆从水平位置缓慢转过一定角度,如图丙所示。
此过程中,弹簧测力计拉力的力臂______(选填“变大”、“变小”或“不变”,下同),拉力的大小______。
【答案】
(1)左;
(2)2.0;偏小;(3)变小;不变。
【解析】
(1)安装好杠杆,将其放到水平位置后松手,发现杠杆沿顺时针方向转动,左端上翘,如图甲所示。
则应将平衡螺母向左调节,直到杠杄在水平位置平衡;
(2)由图可知,根据杠杆平衡条件得:
FA×LA=FB×LB,3×0.5N×4L=FB×3L,所以FB=2.0N;若在第
(1)小题所描述的情形中未调节平衡螺母而直接开展上述实验,由于左侧已经存在杠杆的力与力臂的乘积,故弹簧测力计的示数会偏小;
(3)图丙使杠杆由水平位置时,根据杠杆平衡条件F1L1=F2L2得,
G×4L=F2×3L,则F2=
G;
当转动到图中位置时,设杠杆与水平位置的夹角为α,物体的力臂、弹簧测力计拉力的力臂均变小;则根据杠杆平衡条件F1L1=F2L2得,
G×4L×cosα=F2′×3L×cosα,
则:
F2′=
G;所以,在此过程中拉力F的大小不变。
练习7:
(2018龙东)小红和小明利用如图所示装置探究杠杆的平衡条件。
(1)若实验前杠杆如图甲所示,可将杠杆两端的平衡螺母向 (填“左”或“右”)调节,使杠杆在水平位置平衡。
(2)在实验过程中,调节杠杆在水平位置平衡的目的是 。
(3)在杠杆两端加挂钩码,并移动钩码,使杠杆在水平位置平衡,测出力臂,多次实验并把数据记录在表格中。
次数
F1/N
L1/cm
F2/N
L2/cm
1
1
10
2
5
2
2
10
1
20
3
2
15
3
10
小明根据以上数据得出杠杆平衡条件是 。
(4)杠杆调节平衡后,小红在杠杆上的A点处挂4个钩码,如图乙所示,为使在重新平衡,应在B点挂 个钩码。
当杠杆平衡后,将A点和B点下方所挂的钩码同时向支点0靠近一格,杠杆会 (填“左侧下降”、“右侧下降”或“仍水平平衡”)。
(5)如图丙所示,用弹簧测力计在C处竖直向上拉,使杠杆在水平位置平衡,当弹簧测力计在原位置逐渐向左倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将 (填“变大”,“变小”或“不变”)。
【答案】
(1)右;
(2)便于测量力臂;(3)F1L1=F2L2;(4)6;左侧下降;(5)变大。
【解析】
(1)若实验前杠杆如图甲所示,左端下沉,右端上翘,可将杠杆两端的平衡螺母向右调节,使杠杆在水平位置平衡。
(2)实验时让横杆AB在水平位置平衡,力臂在杠杆上便于测量力臂大小,杠杆的重心通过支点,可以消除杠杆重对杠杆平衡的影响;
(3)分析表格中的数据可得出杠杆平衡的条件是:
F1L1=F2L2;
(4)设杠杆每个格的长度为L,每个钩码的重力为G,根据杠杆的平衡条件:
FALA=FBLB,即4G×3L=FB×2L,解得FB=6G,需挂6个钩码;
根据杠杆的平衡条件:
FALA=FBLB,若A、B两点的钩码同时向靠近支点的方向移动一个格,则左侧4G×2L=8GL,右侧6G×L=6GL,因为8GL>6GL,所以杠杆左端会下降;
(5)如果作用在杠杆上的力方向不与杠杆垂直则该力的力臂短了,就会使得拉力变大;
练习8:
(2018青岛)实验探究:
探究杠杄的平衡条件
数据
如图甲,利用钩码和刻度尺测量出杠杆平衡时各个力及其力臂,测得数据如下表:
次数
动力F1/N
动力臂L1/cm
阻力F2/N
阻力臂L2/cm
1
1.0
10
2.0
5
2
1.5
5
0.5
15
3
2.0
15
1.5
20
结论
作图
1杠杆的平衡条件是。
②实验进行3次的目的是 (只有个选项正确,填写对应字母)。
a.取平均值减小误差
b.使每组数据更准确
c.归纳出物理规律
③如图乙,若用弹簧测力计的拉力作动力,进行实验,请画出其动力臂。
【答案】
①F1L1=F2L2;②c;③如下图。
【解析】
(1)杠杆的平衡条件:
F1L1=F2L2;
(2)实验中为得出普遍性规律,应多次测量分析得出结论;
(3)力臂是从支点到力的作用线的垂直距离,据此画出力臂的垂线。
解:
①第一次数据:
F1L1=F2L21N×0.1m=2N×0.05m,F1L1=F2L2,
第二组数据:
F1L1=F2L21.5N×0.05m=0.5N×0.15m
第三组数据:
F1L1=F2L22N×0.15m=1.5N×0.2m
杠杆的平衡条件为:
F1L1=F2L2。
②如果实验次数太少,实验研究得出结论具有偶然性,不具有普遍性,实验结论必须在多次试验的基础上得出,这样才能有效地避免实验结果偶然性出现,故选c;
2出其动力臂:
 升级会员
升级会员 